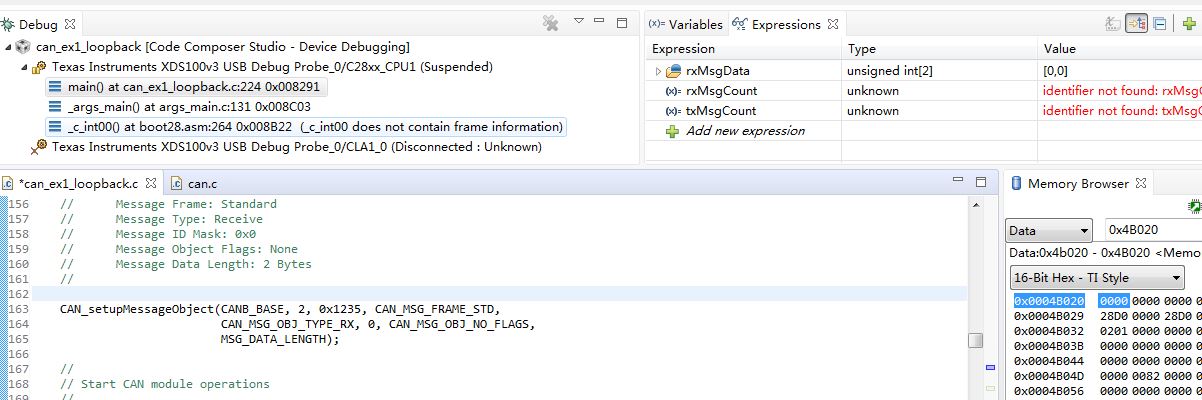
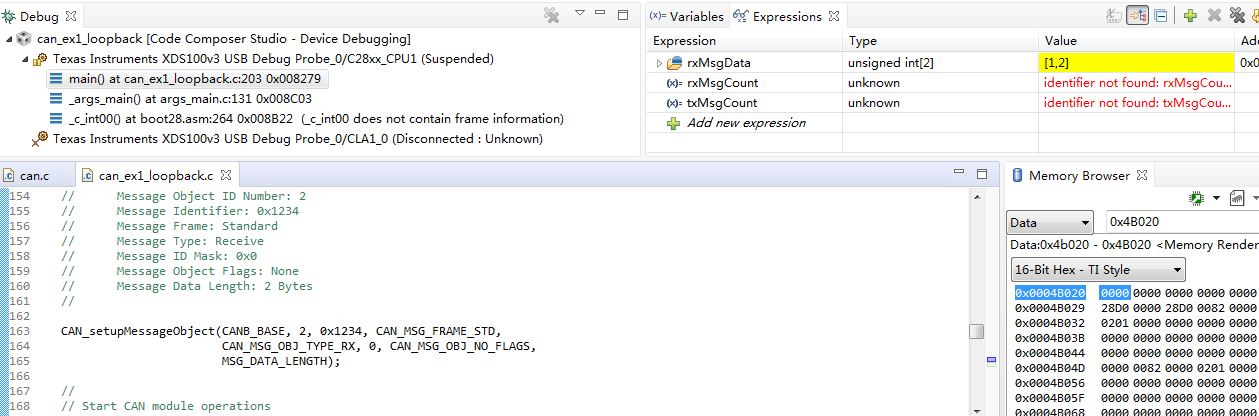
在对官方例程can_ex1_loopback.c(路径为C2000Ware_3_01_00_00\driverlib\f28004x\examples\can)仿真发现只能接收ID为0X1234的帧数据,如下图将接收邮箱的ID改为0x1235后邮箱就接收不到任何数据,将ID改为0x1234就可以接收到数据。此例程的ID Mask 为0 ,也就是掩码是没有作用的,那么想问下如何实现一个邮箱接收不同ID的数据帧,有没有相关例程参考下。谢谢!
在对官方例程can_ex1_loopback.c(路径为C2000Ware_3_01_00_00\driverlib\f28004x\examples\can)仿真发现只能接收ID为0X1234的帧数据,如下图将接收邮箱的ID改为0x1235后邮箱就接收不到任何数据,将ID改为0x1234就可以接收到数据。此例程的ID Mask 为0 ,也就是掩码是没有作用的,那么想问下如何实现一个邮箱接收不同ID的数据帧,有没有相关例程参考下。谢谢!