This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
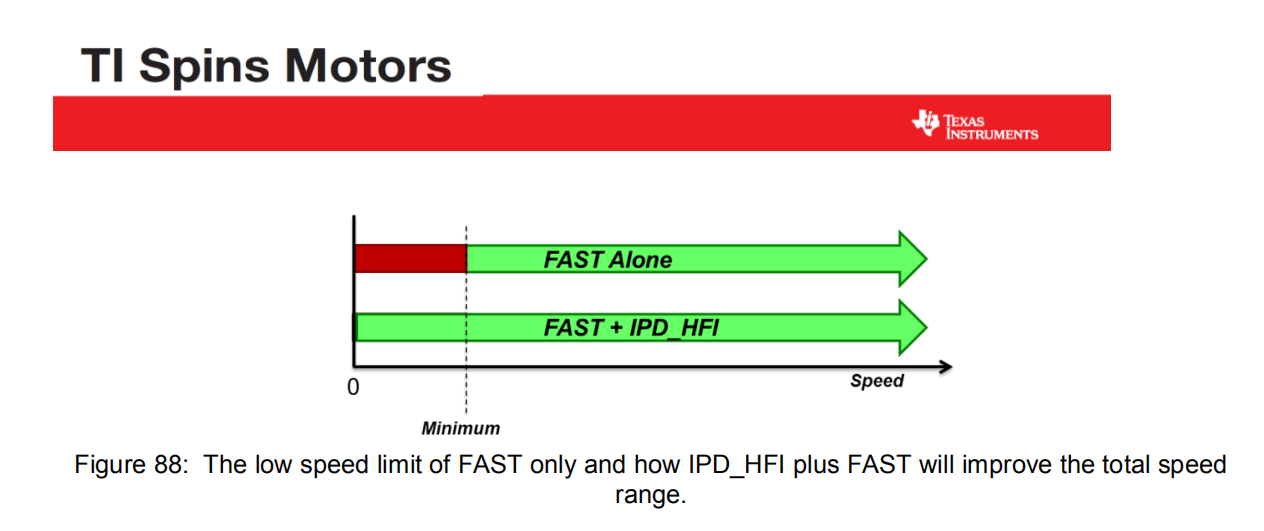
如题所示,在motorware中例程proj_lab21展示了低速和零速是用IPD_HFI,中高速是通过AFSEL切换到FAST观测器,但是motorware其他的例程中并没有使用IPD_HFI,全程只有FAST观测器在运行,是如何做到低速和零速的角度估算呢?而且instaspin_labs文档说明中也表示FAST观测器本身角度估算是不能覆盖到低速和零速的,这点觉得很奇怪,望解惑,谢谢!