F280049CAN通信用中断方式接收,很稳定。想用查询方式发送减少中断次数。
配置了四个MSG_OBJ为发送,发送前先查询哪个MSG_OBJ空闲,哪个空闲就用哪个发送。
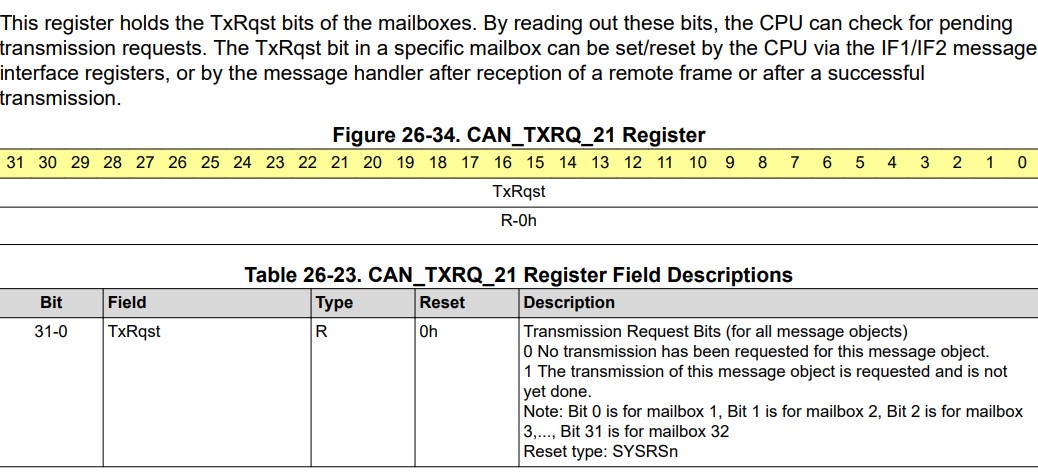
现在的问题是,怎么查询哪个MSG_OBJ是空闲的。
查询状态的drivlib函数只有CAN_getStatus(CANA_BASE),但是这个好像不行。
谢谢!!
F280049CAN通信用中断方式接收,很稳定。想用查询方式发送减少中断次数。
配置了四个MSG_OBJ为发送,发送前先查询哪个MSG_OBJ空闲,哪个空闲就用哪个发送。
现在的问题是,怎么查询哪个MSG_OBJ是空闲的。
查询状态的drivlib函数只有CAN_getStatus(CANA_BASE),但是这个好像不行。
谢谢!!