Part Number: TMS320F28069M
Other Parts Discussed in Thread: TMDSHVMTRINSPIN, TMS320F28069, TMS320F28069F, MOTORWARE, C2000WARE
我使用TMDSHVMTRINSPIN套件,TMS320F28069主控芯片进行lab01b(验证硬件的完整性)实验
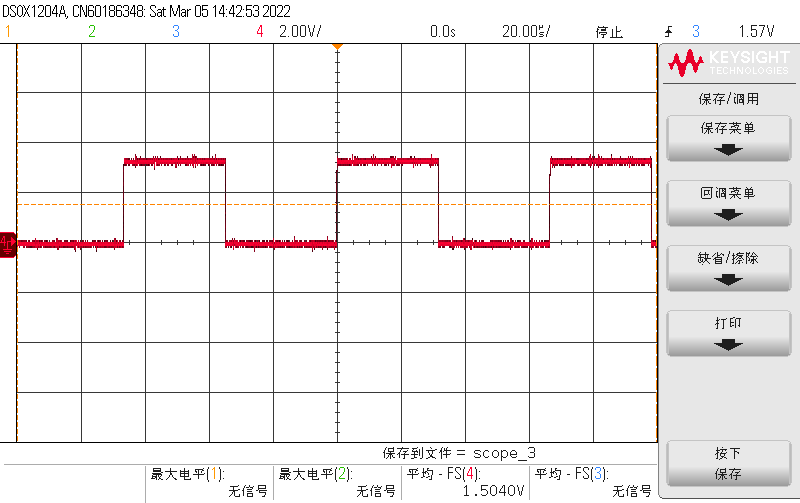
在不连电机(使用的是自己的电机)的情况下根据官方文档设置,利用示波器测试4路PWMDAC信号的输出波形,只有角度和马鞍波的信号,但是没有PhaseA电流信号,
而且利用示波器观测6路PWM输出信号,只有低位PWM1L、PWM2L、PWM3L有输出信号,没有PWM1H、PWM2H、PWM3H没有输出信号,请问该种问题应该如何进行继续调试?