This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
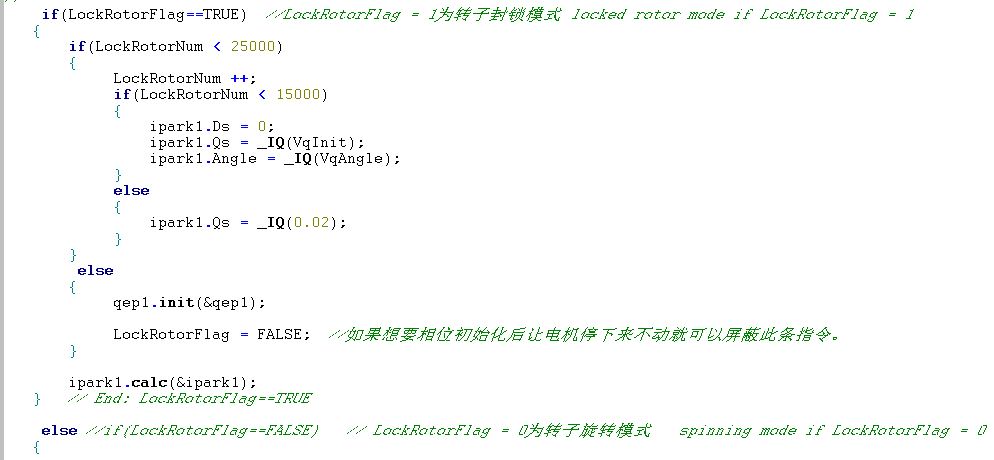
我在调试PMSM3_1时,调到Lever4,程序里面有个LOCKRotorFlag=0或LOCKRotorFlag=1两种程序。不知道是用来干什么的,请大侠指教!
wei sun,
应该是开环切换到闭环的标志,因为例程中PMSM都是先开环启动的,SMO滑模observer要靠感应电动势来获取电机转子位置,但是在启动时感应电动势太小,所以TI的例程中都是先开环启动,等到达一定速度后,感应电动势足够大,就切换到SMO中,用SMO来获取电机转子位置,进行闭环控制。
Eric
我好想看过这个程序,但是记得不是 太清楚了;,如果=1的话好像是锁定转子的程序,只有=0时才能使电机运转。 可能是这样的。你可以看看软件结构框图和介绍;
另外我也有一个问题: 这个是在RAM中运行的软件,我不太懂如何修改在ROM中运行,或者说是烧写FLASH中,然后脱开仿真器运行。另外还有一个重要的就是 PMSM是运转前需要FOC,也就是定位转子位置,才能转。我不知道您是怎么做的?
听论坛里说,这个是个转子定位的程序!我具体不太明白,你调到哪一步了
在启动的时候,必须有一个转子定位的过程,那么一般的做法就是开环给一个直流,将转子固定到0度,然后再开始无传感器的启动。
Eric Ma,
你好,我最近在做此帖中PMSM控制的LEVEL4的实验,通过通过观测发现 LockRotorFlag=1,并不改变。同时观测LockRotorNum数值虽然一直在增加,但最终会停在23000左右,故不会执行下方else内的控制器程序。 实验现象具体表现为:RUN后,电机叮一声不转动,提示如图所示错误。
望提供一些办法或思路,谢谢。