Part Number: TMS320F280049
Other Parts Discussed in Thread: CONTROLSUITE
问题1描述:CLA计算周期为12.5us,CLA初始化以及sin,cos信号输入正常,经过resolver_algo_CLA( )计算,解码结果是正确的,为什么sin 、cos信号经过FIR滤波器之后(sinFIRout,FIRout)数值一直为零?
问题2描述:CLA计算周期为12.5us,经过resolver_algo_CLA( )计算角度是正确且比较稳定,把CLA计算周期改为6.25us计算结果就不对而且角度一直在跳动请帮忙分析一下原因及解决对策。谢谢!
补充说明:
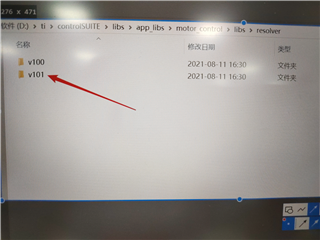
1、调用controlSUITE的库如下图
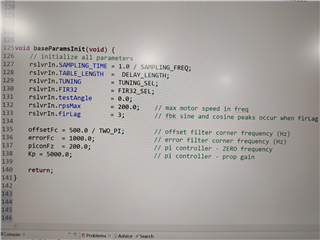
2、初始化函数及参数如下
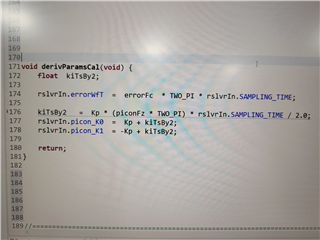
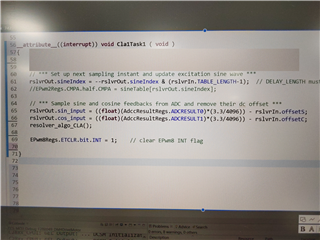
3、CLA任务
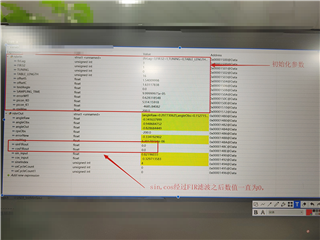
4、问题1附图如下