Part Number: TMS320F280025C
Other Parts Discussed in Thread: C2000WARE
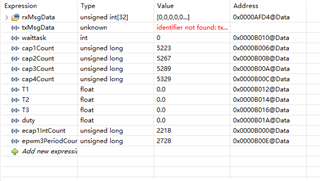
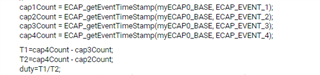
我使用了C:\ti\c2000\C2000Ware_4_00_00_00\driverlib\f28002x\examples\ecap\ecap_ex2_capture_pwm例程进行测试,但是发现捕获到的数据,在debug时cap1,cap2,cap3,cap4的值不一样,可是做差后数值一样,因此无法算占空比。然后设置断点,发现每次捕获到的数是一样的,不知道问题出在哪里