

Part Number: TMS320F28069F
Other Parts Discussed in Thread: MOTORWARE
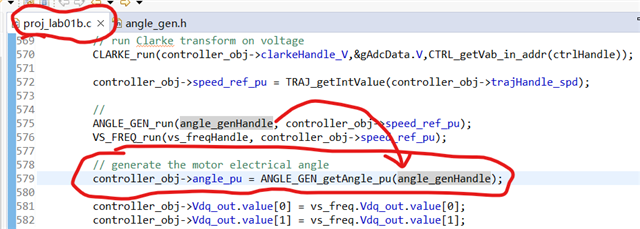
在我的理解里,电角度是 controller_obj->angle_pu 这个变量。在程序里:
ANGLE_GEN_getAngle_pu 函数的定义如下
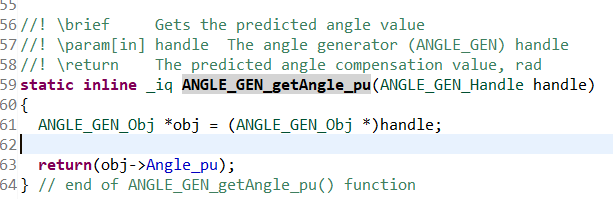
也就是说,是用的 angle_genHandle->Angle_pu 去计算的电角度;
然后从图1中,可以看到是 函数 ANGLE_GEN_run 计算 Angle_genHandle->Angle_pu。函数 ANGLE_GEN_run的定义如下:
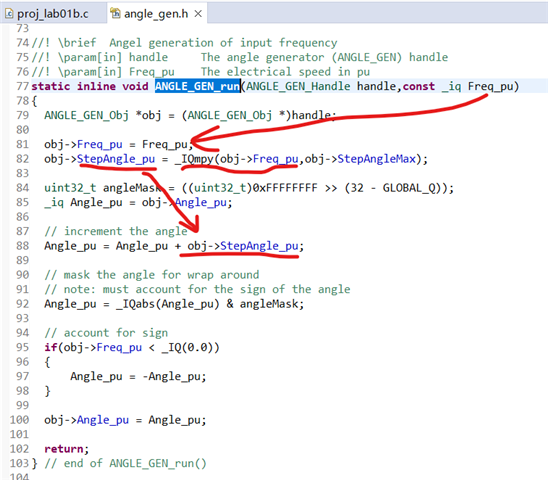
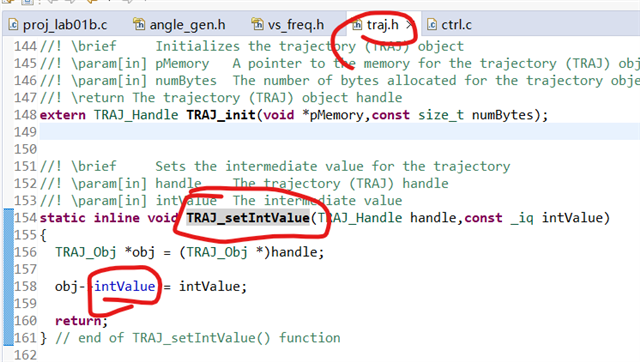
结合图1图3,即每次的增量应该是 controller_obj->speed_ref_pu 这个变量。但是图1中还可以看到一行代码是 controller_obj->speed_ref_pu = TRAJ_getIntValue(controller_obj->trajHandle_spd);
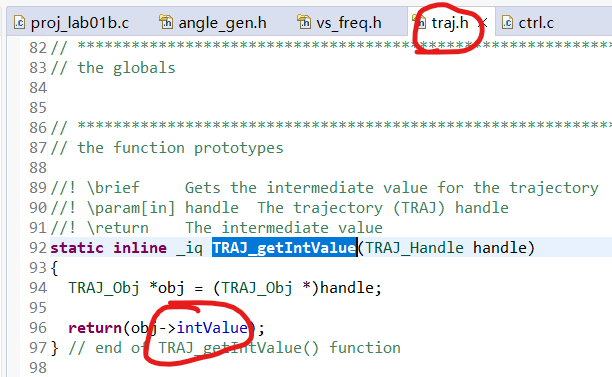
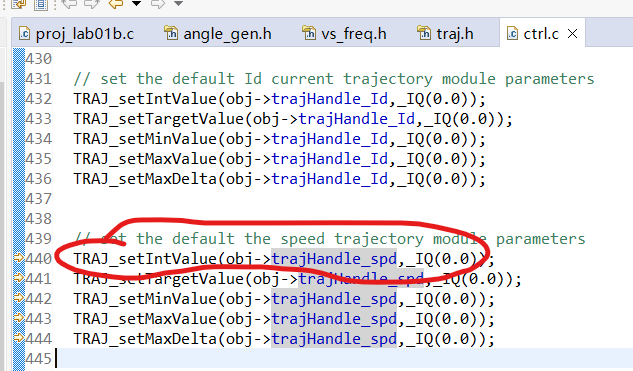
然而从图4、5、6三张图中,看到的是把 增量 controller_obj->speed_ref_pu 设置成0了。
我的疑问是,那电角度岂不是每次都不变吗?如果是我对代码研读有误,请指出

