Part Number: TMS320F28377D
unsigned char trans[6] = {0xAA,0xC3,0x00,0xA2,0x00,0x24}; //所要发送的信息
void spi_xmit(Uint16 a); //发送一个数据
void Ready_Config(); //从机芯片ready标志位,此位读到1表明从机已经准备好,才可以与从机进行通信
void SPI_RXbuff(unsigned char *buff,unsigned int len);
void SPI_TXbuff(unsigned char *buff,unsigned int len);
unsigned char cmd_result[2] = {0x00}; //所要接收的返回信息存放数组,目前为0
void main(void)
{
Ready_Config();
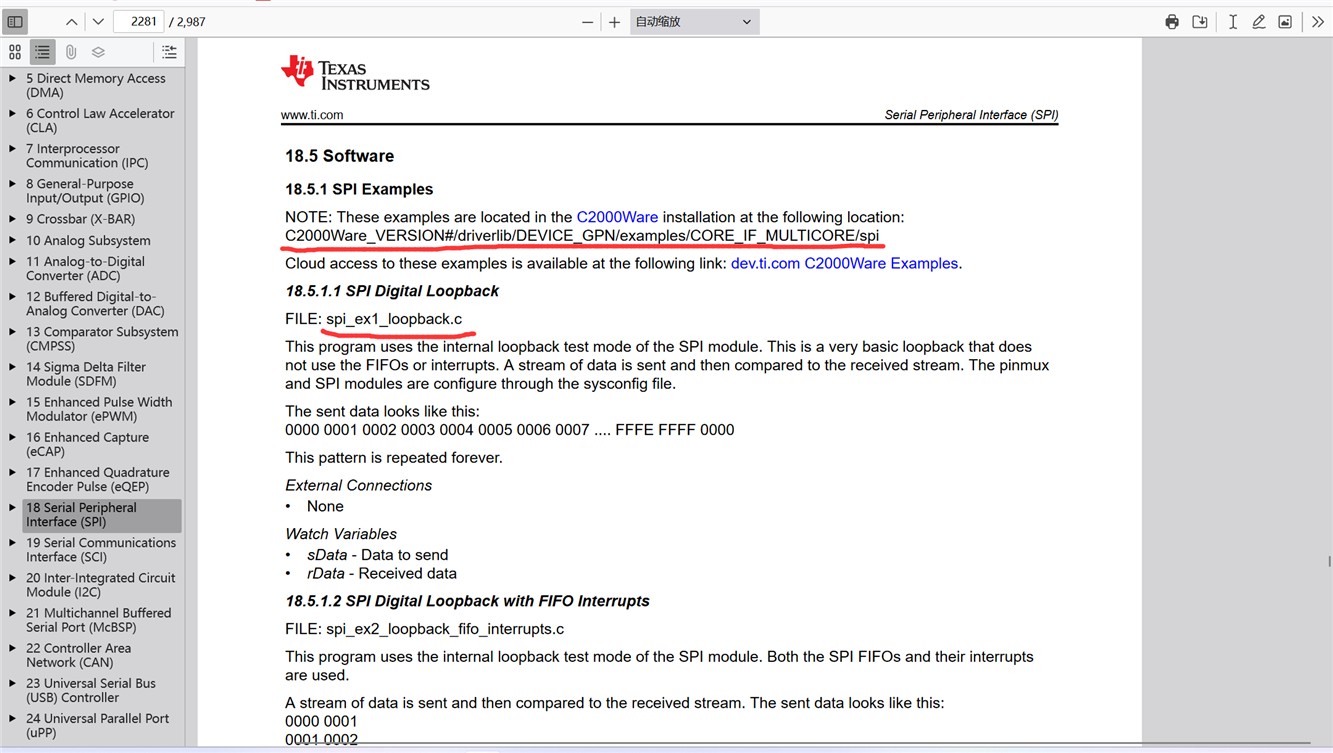
//TI官方spi loopback例程,给出的初始化
// Step 1. Initialize System Control:
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the F2837xS_SysCtrl.c file.
InitSysCtrl();
// Step 2. Initialize GPIO:
// This example function is found in the F2837xS_Gpio.c file and
// illustrates how to set the GPIO to it's default state.
InitGpio(); // Skipped for this example
// Setup only the GP I/O only for SPI-A functionality
// This function is found in F2837xS_Spi.c
InitSpiaGpio();
// Step 3. Clear all __interrupts and initialize PIE vector table:
// Disable CPU __interrupts
DINT;
// Initialize PIE control registers to their default state.
// The default state is all PIE __interrupts disabled and flags
// are cleared.
// This function is found in the F2837xS_PieCtrl.c file.
InitPieCtrl();
// Disable CPU __interrupts and clear all CPU __interrupt flags:
IER = 0x0000;
IFR = 0x0000;
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the __interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in F2837xS_DefaultIsr.c.
// This function is found in F2837xS_PieVect.c.
InitPieVectTable();
// Step 4. Initialize the Device Peripherals:
InitSpi(); // init SPI
//发送接收
SPI_TXbuff(trans,6);
DELAY_US(10);
SPI_RXbuff(cmd_result,2);
}
//各函数定义
void spi_xmit(Uint16 a)
{
//while(SpiaRegs.SPISTS.bit.BUFFULL_FLAG);
SpiaRegs.SPITXBUF=a; // SPI Serial Output Buffer Register
//while(SpiaRegs.SPISTS.bit.INT_FLAG != 1);
}
//Ready信号接收引脚设置为GPIO10
void Ready_Config()
{
EALLOW;
GpioCtrlRegs.GPAMUX1.bit.GPIO10 = 0; //i/o
// GpioCtrlRegs.GPAPUD.bit.GPIO10 = 0; //内部上拉
GpioCtrlRegs.GPADIR.bit.GPIO10 = 0; //input
EDIS;
}
//接收缓冲区数据函数
void SPI_RXbuff(unsigned char *buff,unsigned int len) //uint8_t uint32_t
{
unsigned int i = 0;
if(len==0) return;
while(GpioDataRegs.GPADAT.bit.GPIO10 == 0);//等待从机就绪
GpioDataRegs.GPACLEAR.bit.GPIO11 = 1; //拉低片选信号
DELAY_US(10);
for(i=0;i<len;i++)
{
buff[i] = (SpiaRegs.SPIRXBUF>>8);
DELAY_US(10);
}
GpioDataRegs.GPASET.bit.GPIO11 = 1;//拉高片选信号
}
//发送缓冲区数据函数
void SPI_TXbuff(unsigned char *buff,unsigned int len) //uint8_t uint32_t
{
unsigned int i = 0;
if(len==0) return;
while(GpioDataRegs.GPADAT.bit.GPIO10 == 0);//等待从机就绪
GpioDataRegs.GPACLEAR.bit.GPIO11 = 1; //拉低片选信号
DELAY_US(10);
for(i=0;i<len;i++)
{
spi_xmit(buff[i]); //左移8位,适应MSB的要求
DELAY_US(10);
}
GpioDataRegs.GPASET.bit.GPIO11 = 1;//拉高片选信号
}
//spi.c文件里spi配置
#include "F2837xD_device.h"
#include "F2837xD_Examples.h"
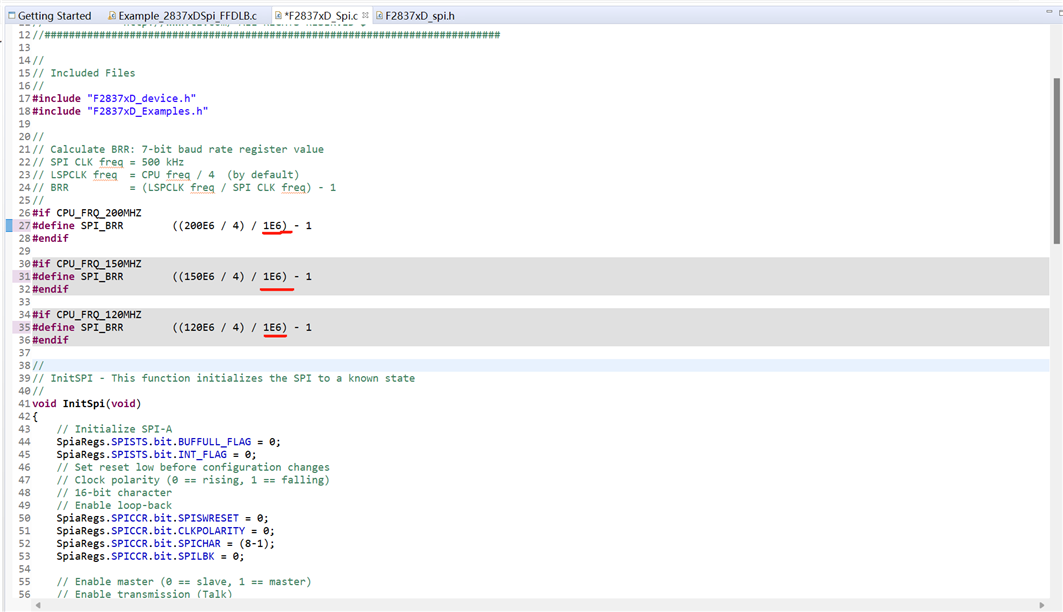
//
// Calculate BRR: 7-bit baud rate register value
// SPI CLK freq = 115200 Hz
// LSPCLK freq = CPU freq / 4 (by default)
// BRR = (LSPCLK freq / SPI CLK freq) - 1
//
#if CPU_FRQ_200MHZ
#define SPI_BRR ((200E6 / 4) / 115200) - 1
#endif
#if CPU_FRQ_150MHZ
#define SPI_BRR ((150E6 / 4) / 115200) - 1
#endif
#if CPU_FRQ_120MHZ
#define SPI_BRR ((120E6 / 4) / 115200) - 1
#endif
//
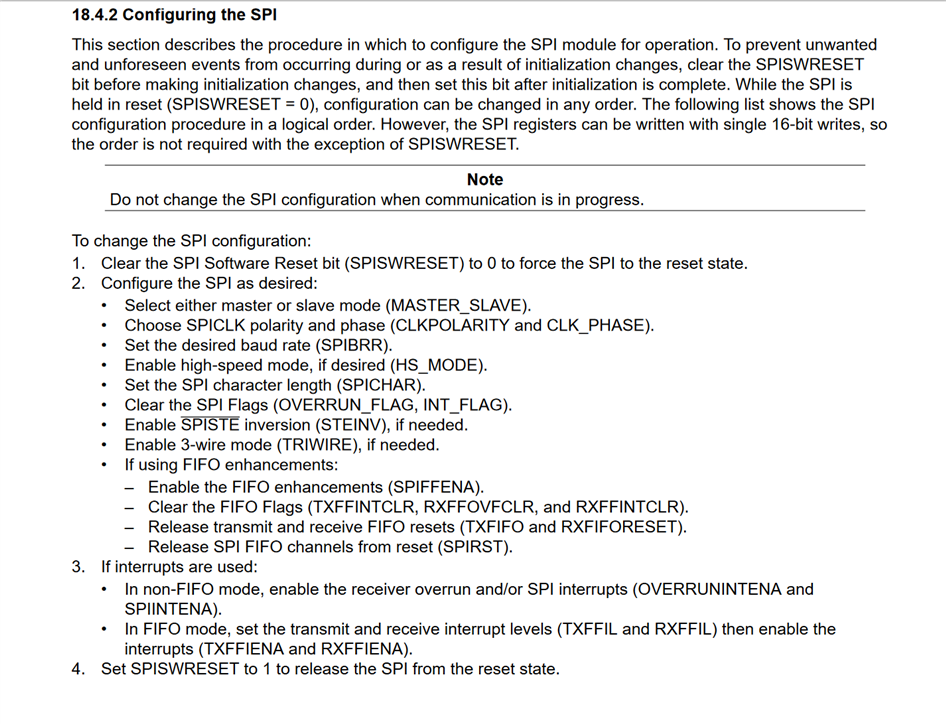
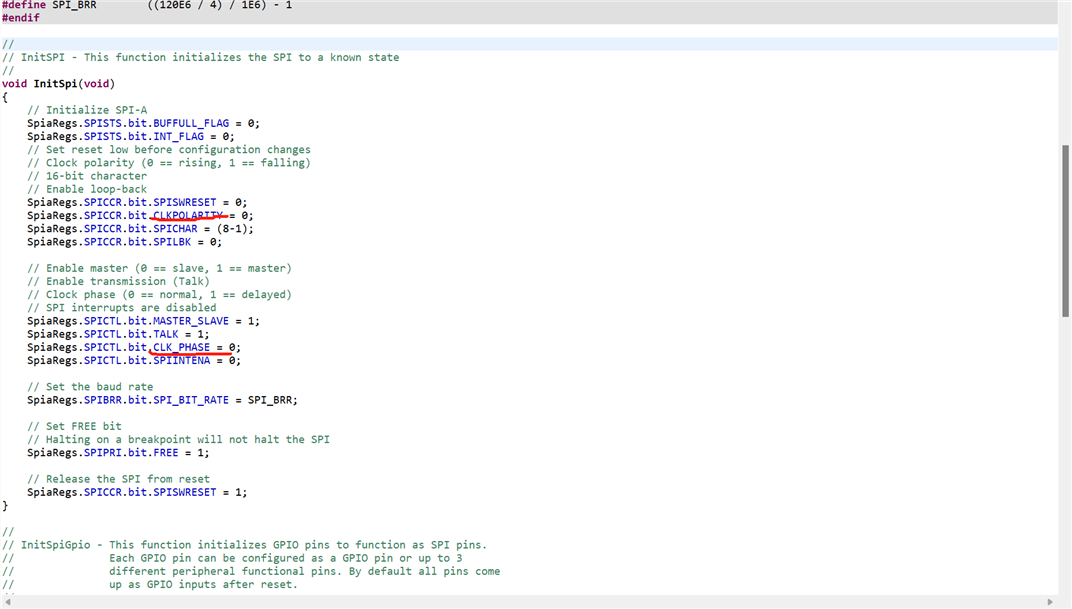
// InitSPI - This function initializes the SPI to a known state
//
void InitSpi(void)
{
// Initialize SPI-A
// Set reset low before configuration changes
// Clock polarity (0 == rising, 1 == falling)
// 8-bit character
// disable loop-back
SpiaRegs.SPICCR.bit.SPISWRESET = 0;
SpiaRegs.SPICCR.bit.CLKPOLARITY = 0;
SpiaRegs.SPICCR.bit.SPICHAR = (8-1);
SpiaRegs.SPICCR.bit.SPILBK = 0;
// Enable master (0 == slave, 1 == master)
// Enable transmission (Talk)
// Clock phase (0 == normal, 1 == delayed)
// SPI interrupts are disabled
SpiaRegs.SPICTL.bit.MASTER_SLAVE = 1;
SpiaRegs.SPICTL.bit.TALK = 1;
SpiaRegs.SPICTL.bit.CLK_PHASE = 0;
SpiaRegs.SPICTL.bit.SPIINTENA = 0;
// Set the baud rate
SpiaRegs.SPIBRR.bit.SPI_BIT_RATE = SPI_BRR;
// Set FREE bit
// Halting on a breakpoint will not halt the SPI
SpiaRegs.SPIPRI.bit.FREE = 1;
// Release the SPI from reset
SpiaRegs.SPICCR.bit.SPISWRESET = 1;
}
//
// InitSpiGpio - This function initializes GPIO pins to function as SPI pins.
// Each GPIO pin can be configured as a GPIO pin or up to 3
// different peripheral functional pins. By default all pins come
// up as GPIO inputs after reset.
//
// Caution:
// For each SPI peripheral
// Only one GPIO pin should be enabled for SPISOMO operation.
// Only one GPIO pin should be enabled for SPISOMI operation.
// Only one GPIO pin should be enabled for SPICLK operation.
// Only one GPIO pin should be enabled for SPISTE operation.
// Comment out other unwanted lines.
//
void InitSpiGpio()
{
InitSpiaGpio();
}
//
// InitSpiaGpio - Initialize SPIA GPIOs
//
void InitSpiaGpio()
{
EALLOW;
//
// Enable internal pull-up for the selected pins
//
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
//
GpioCtrlRegs.GPAPUD.bit.GPIO16 = 0; // Enable pull-up on GPIO16 (SPISIMOA)
// GpioCtrlRegs.GPAPUD.bit.GPIO5 = 0; // Enable pull-up on GPIO5 (SPISIMOA)
GpioCtrlRegs.GPAPUD.bit.GPIO17 = 0; // Enable pull-up on GPIO17 (SPISOMIA)
// GpioCtrlRegs.GPAPUD.bit.GPIO3 = 0; // Enable pull-up on GPIO3 (SPISOMIA)
GpioCtrlRegs.GPAPUD.bit.GPIO18 = 0; // Enable pull-up on GPIO18 (SPICLKA)
GpioCtrlRegs.GPAPUD.bit.GPIO19 = 0; // Enable pull-up on GPIO19 (SPISTEA)
//
// Set qualification for selected pins to asynch only
//
// This will select asynch (no qualification) for the selected pins.
// Comment out other unwanted lines.
//
GpioCtrlRegs.GPAQSEL2.bit.GPIO16 = 3; // Asynch input GPIO16 (SPISIMOA)
// GpioCtrlRegs.GPAQSEL1.bit.GPIO5 = 3; // Asynch input GPIO5 (SPISIMOA)
GpioCtrlRegs.GPAQSEL2.bit.GPIO17 = 3; // Asynch input GPIO17 (SPISOMIA)
// GpioCtrlRegs.GPAQSEL1.bit.GPIO3 = 3; // Asynch input GPIO3 (SPISOMIA)
GpioCtrlRegs.GPAQSEL2.bit.GPIO18 = 3; // Asynch input GPIO18 (SPICLKA)
GpioCtrlRegs.GPAQSEL2.bit.GPIO19 = 3; // Asynch input GPIO19 (SPISTEA)
//
//Configure SPI-A pins using GPIO regs
//
// This specifies which of the possible GPIO pins will be SPI functional
// pins.
// Comment out other unwanted lines.
//
GpioCtrlRegs.GPAMUX2.bit.GPIO16 = 1; // Configure GPIO16 as SPISIMOA
// GpioCtrlRegs.GPAMUX1.bit.GPIO5 = 2; // Configure GPIO5 as SPISIMOA
GpioCtrlRegs.GPAMUX2.bit.GPIO17 = 1; // Configure GPIO17 as SPISOMIA
// GpioCtrlRegs.GPAMUX1.bit.GPIO3 = 2; // Configure GPIO3 as SPISOMIA
GpioCtrlRegs.GPAMUX2.bit.GPIO18 = 1; // Configure GPIO18 as SPICLKA
GpioCtrlRegs.GPAMUX2.bit.GPIO19 = 1; // Configure GPIO19 as SPISTEA
//使能软件片选信号 GPIO11
GpioCtrlRegs.GPAMUX1.bit.GPIO11 = 0; // 设置为普通的GPIO模式
GpioCtrlRegs.GPADIR.bit.GPIO11 = 1; //设置为输出i/o
EDIS;
}
//
// End of file
//
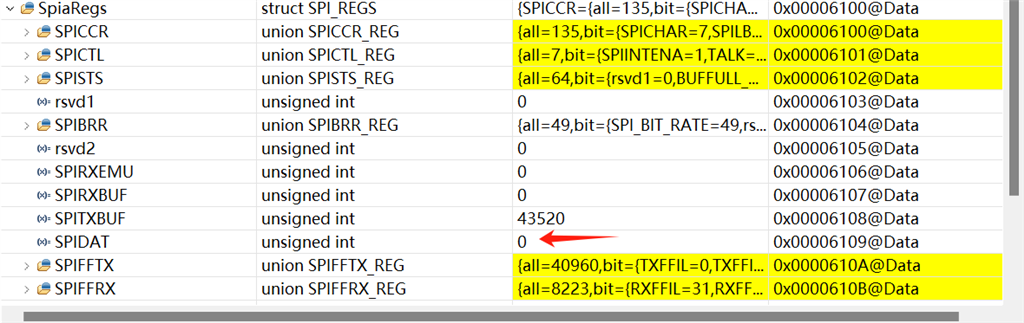
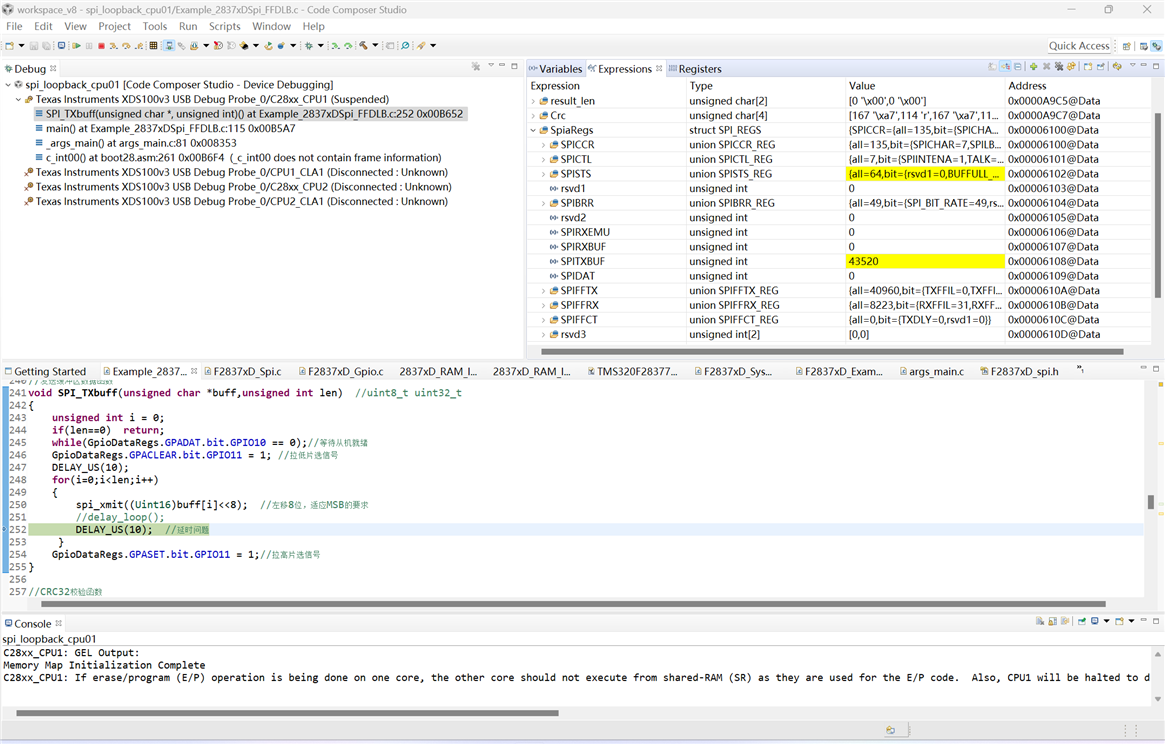
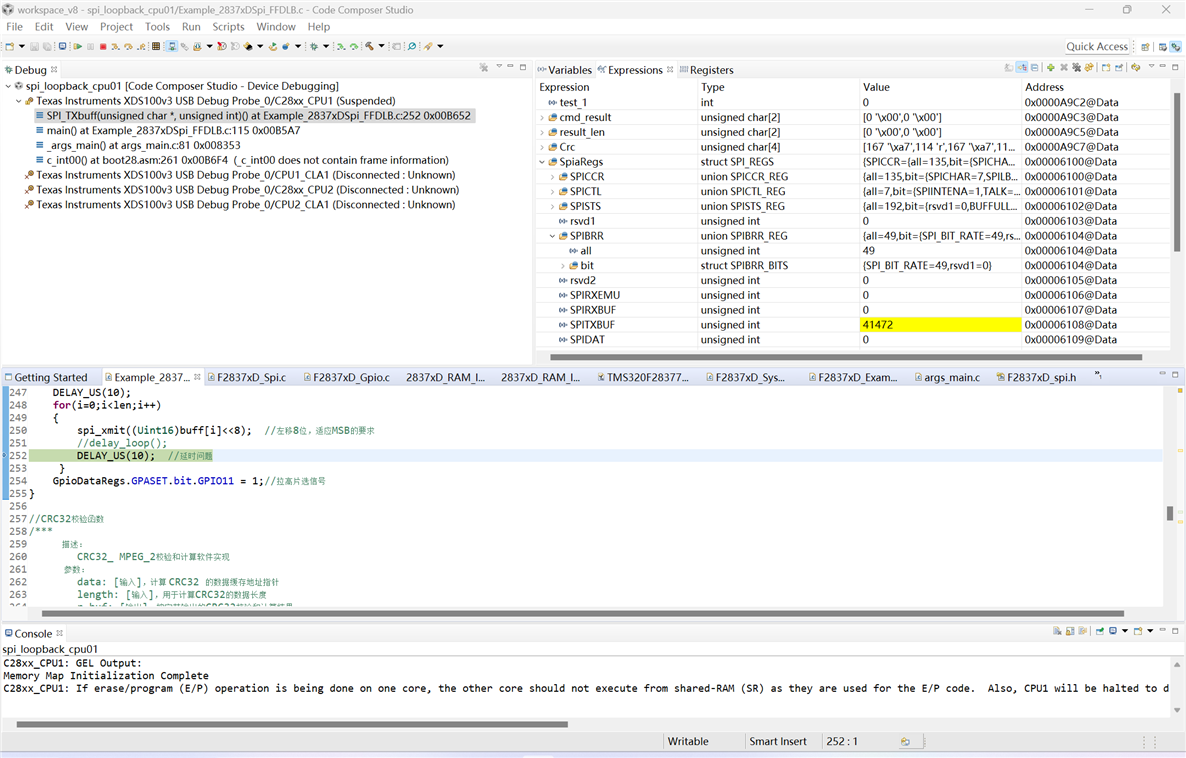
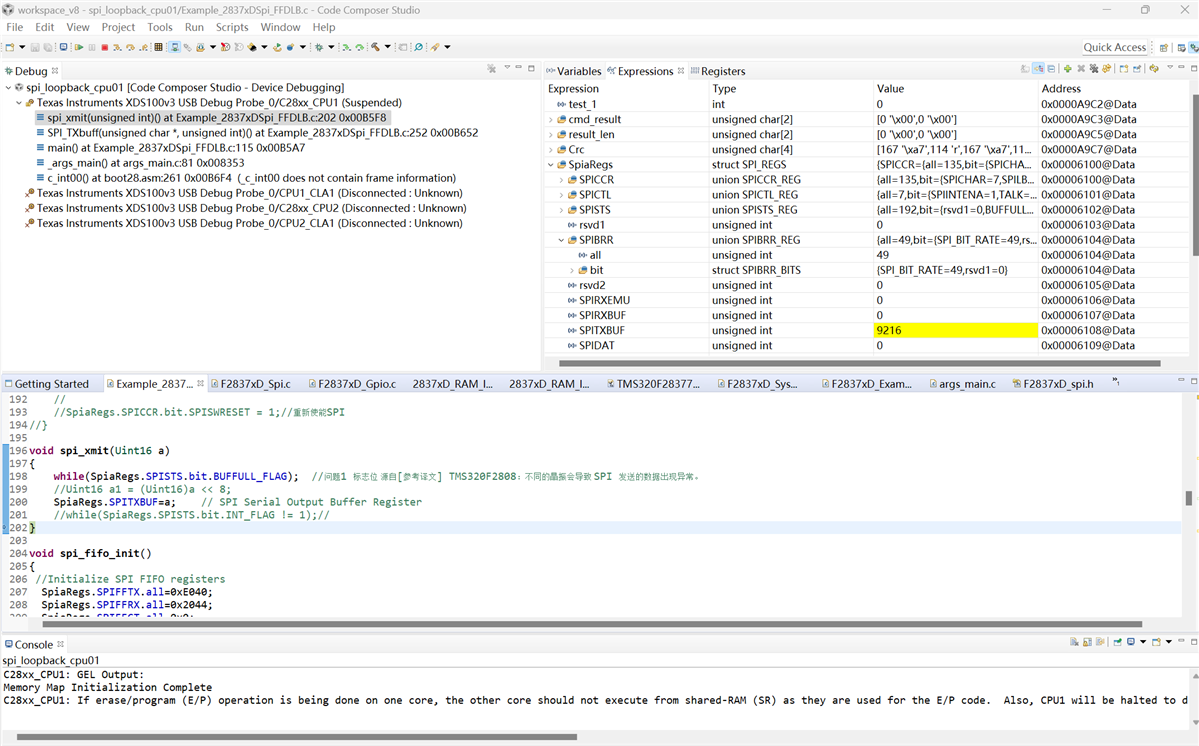
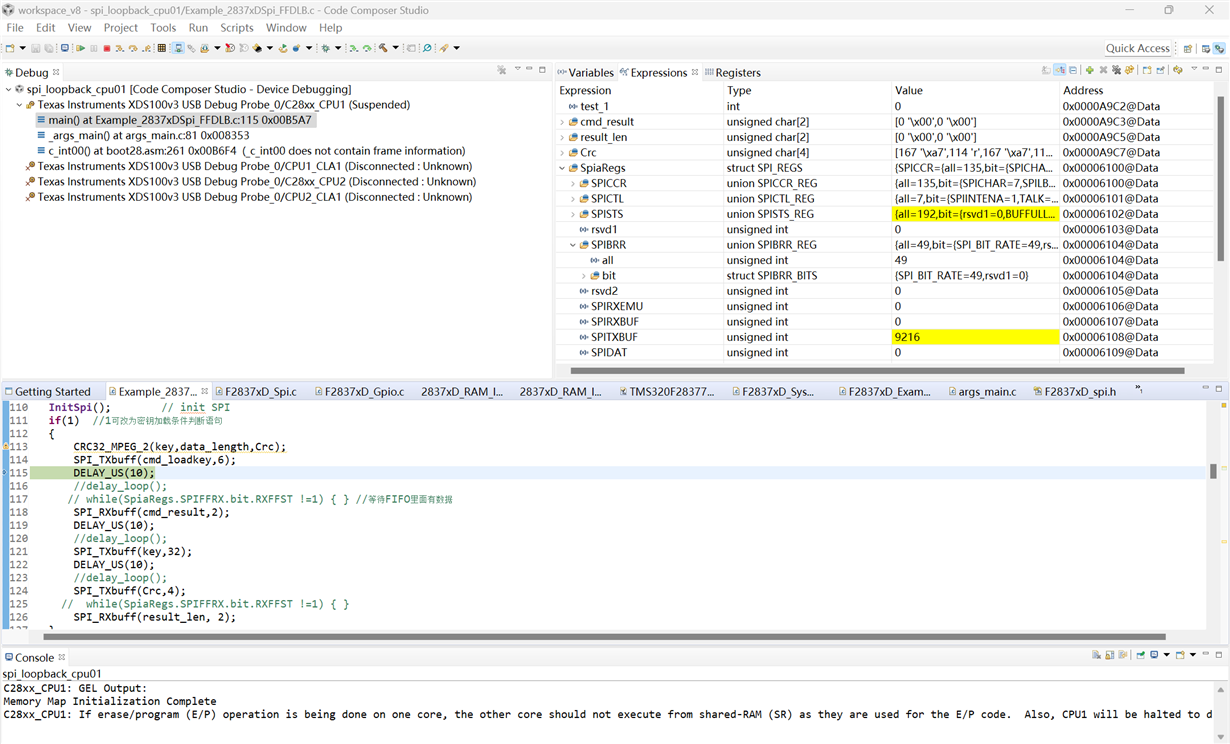
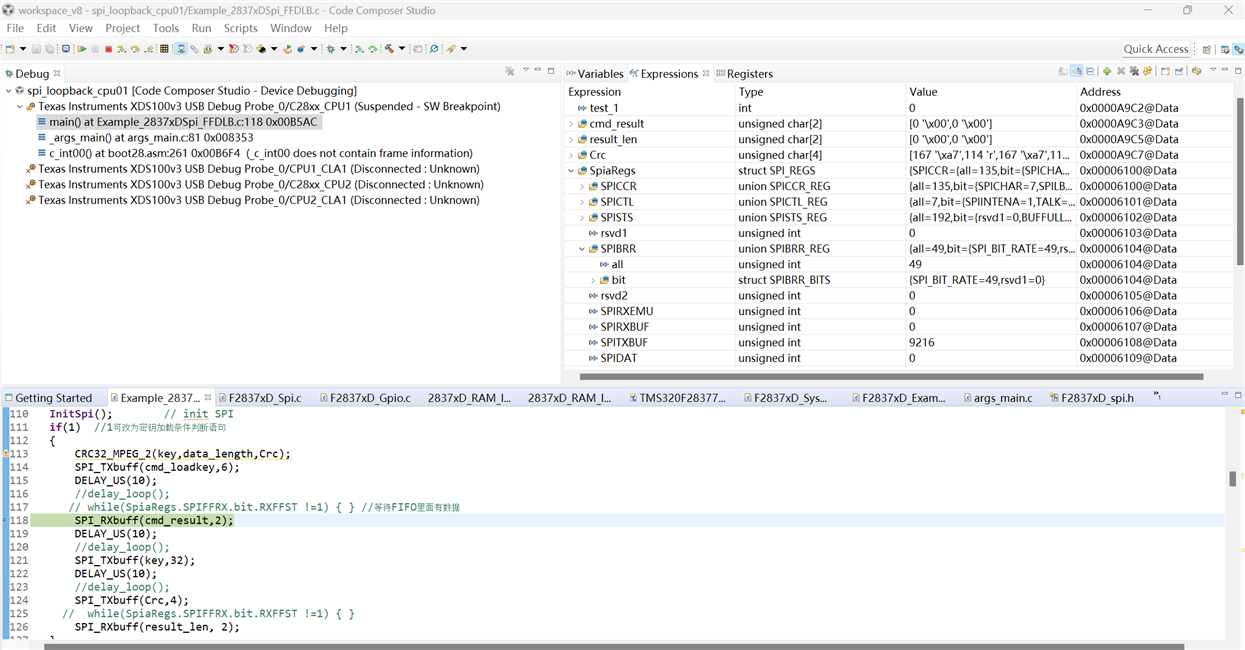
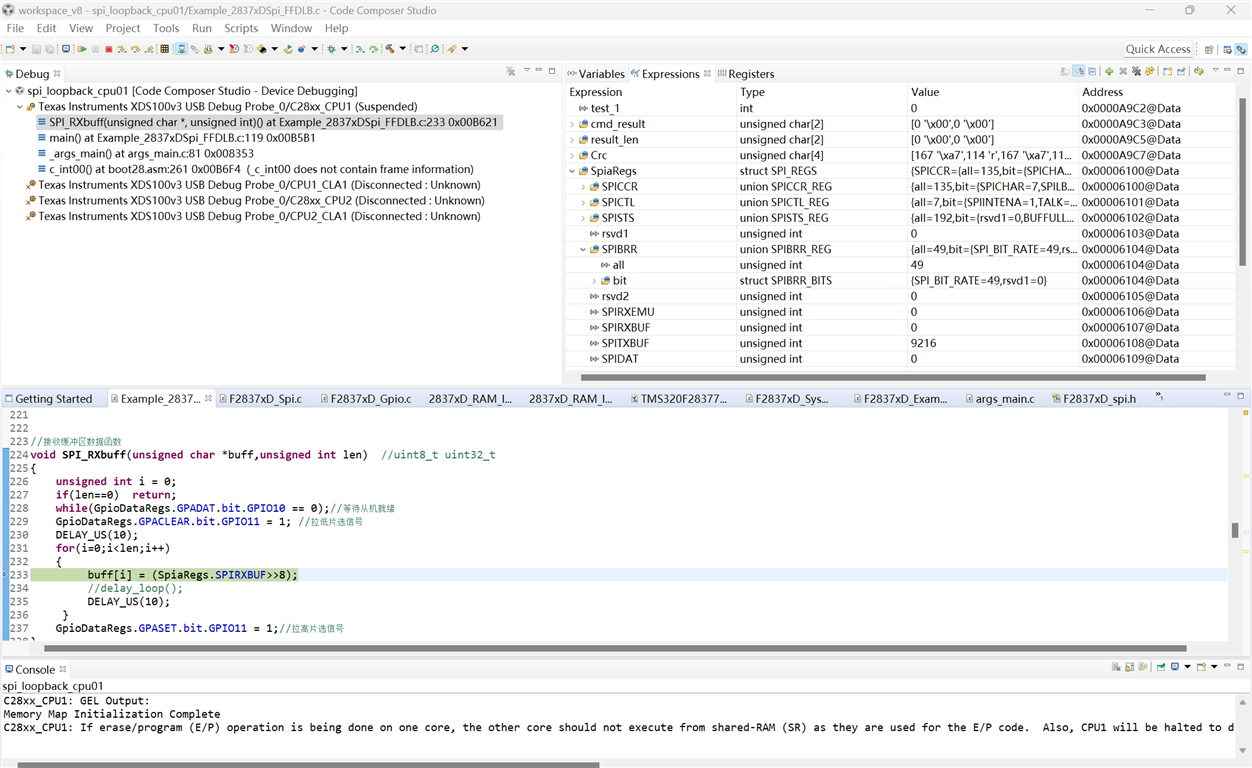
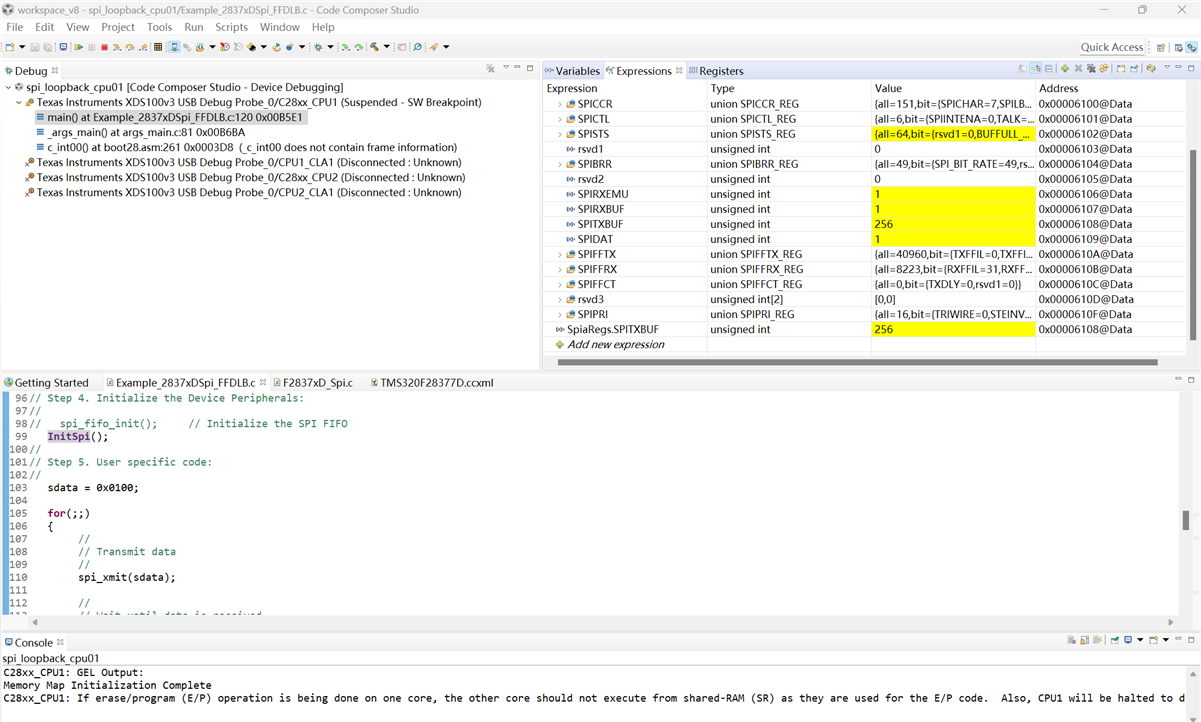
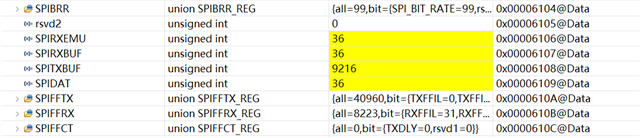
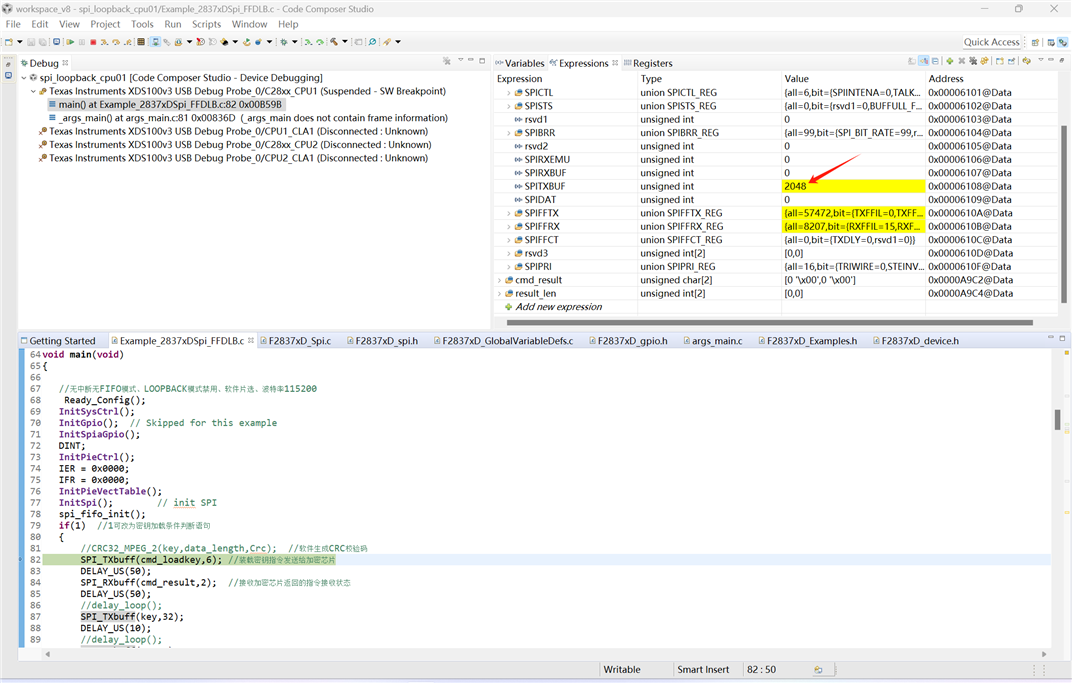
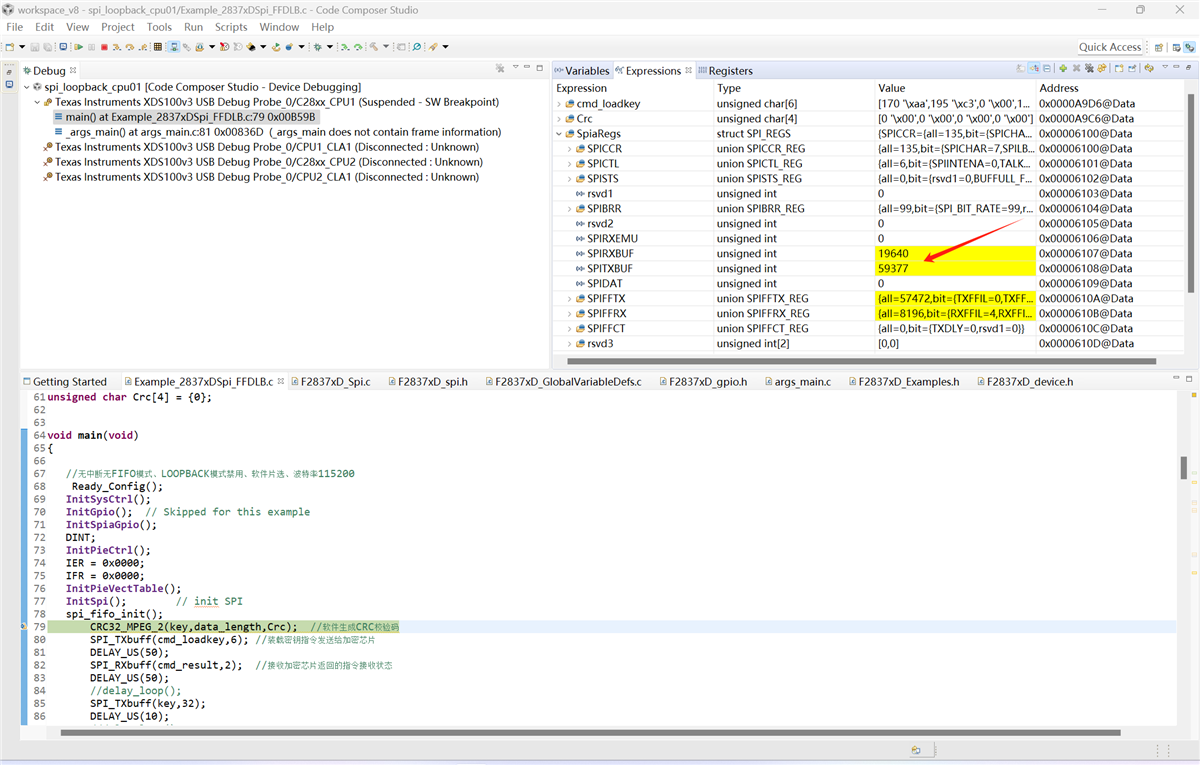
debug结果为: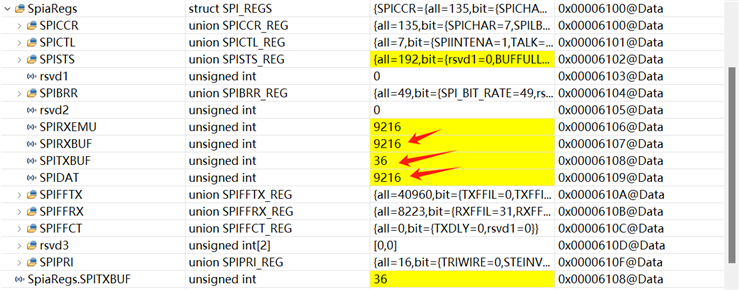
![]()
可以看出RXBUF的值就是TXBUF的值左移8位(用16进制可以很明显观察到,比如TXBUF是0x24,RXBUF就是0x2400)。loopback模式已经禁用,可是还是感觉数据传输处于loopback模式里,没有真正接收到从机返回值。
以上问题无论是否启用中断模式都是一样存在。