

Part Number: TMS320F2800157
TI的工程师,你好
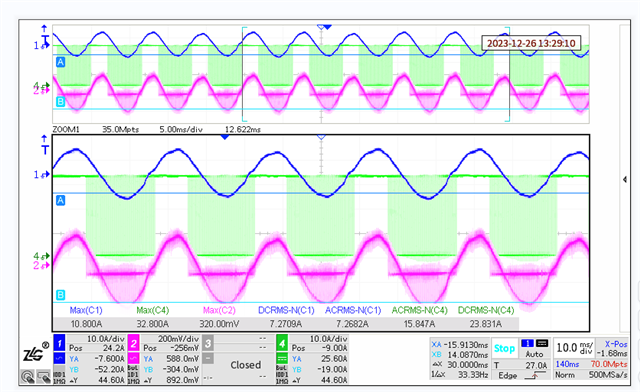
我现在用通用的电机控制程序(universal motor control sdk 5.0)运行LEVEL 4, 无传感器控制,FAST库,发现电机运行时候,PWM没有完全调制如下图。
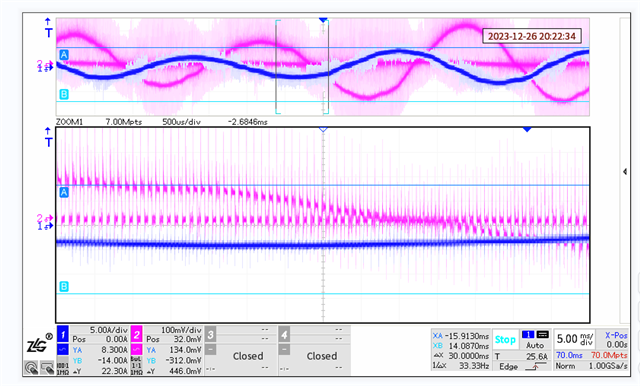
正常我们以前的电机控制程序的波形如下,在电流的正负半周都有PWM调制
我尝试按照如下的注释修改调制方式,但没有作用,请帮忙看下如何修改调整方式,使得电流的正负半周都有PWM调制。目前这个通用电机控制程序为什么用这种调制方式
//! \brief Defines the maximum Vs magnitude in per units allowed
//! \brief This value sets the maximum magnitude for the output of the Id and
//! \brief Iq PI current controllers. The Id and Iq current controller outputs
//! \brief are Vd and Vq. The relationship between Vs, Vd, and Vq is:
//! \brief Vs = sqrt(Vd^2 + Vq^2). In this FOC controller, the Vd value is set
//! \brief equal to USER_MAX_VS_MAG*USER_VD_MAG_FACTOR.
//! \brief so the Vq value is set equal to sqrt(USER_MAX_VS_MAG^2 - Vd^2).
//!
//! \brief Set USER_MAX_VS_MAG = 0.5 for a pure sinewave with a peak at
//! \brief SQRT(3)/2 = 86.6% duty cycle. No current reconstruction
//! \brief is needed for this scenario.
//!
//! \brief Set USER_MAX_VS_MAG = 1/SQRT(3) = 0.5774 for a pure sinewave
//! \brief with a peak at 100% duty cycle. Current reconstruction
//! \brief will be needed for this scenario (Lab08).
//!
//! \brief Set USER_MAX_VS_MAG = 2/3 = 0.6666 to create a trapezoidal
//! \brief voltage waveform. Current reconstruction will be needed
//! \brief for this scenario (Lab08).
//!
//! \brief For space vector over-modulation, see lab08 for details on
//! \brief system requirements that will allow the SVM generator to
//! \brief go all the way to trapezoidal.
//!
#define USER_M1_MAX_VS_MAG_PU (0.6f)
//#define USER_M1_MAX_VS_MAG_PU (0.65f)
//#define USER_M1_MAX_VS_MAG_PU (0.576f)
//#define USER_M1_MAX_VS_MAG_PU (0.565f)
//#define USER_M1_MAX_VS_MAG_PU (0.5f)
