测试状况:
使用该范例计算马达转速,基本上计算出来的转速近似实际转速,但是就是会出现周期性归零的值,转速越高,频率越高。不知道各位是否建议和解决办法?
以下是eQEP的设定
QPOSMAX=0X1F40//设定最大位置计数为2000ppr*4=8000=0X1F40
QUPRD=600000
QEPCTL=0X800E//设定Position counter reset on an index event
QCAPCTL=0X8075
硬件:2000ppr的encoder-> 光耦合隔离电路->f28035(eQep1A, eQep1B, eQep1I)
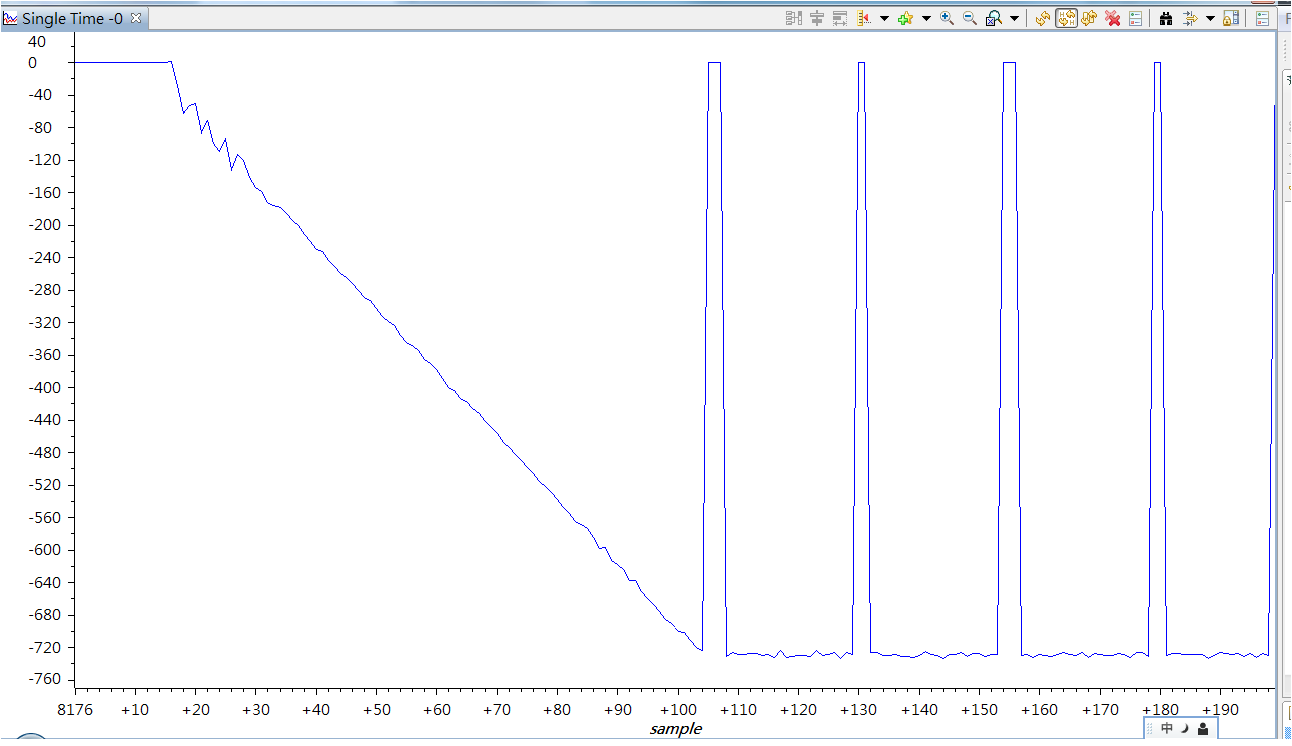
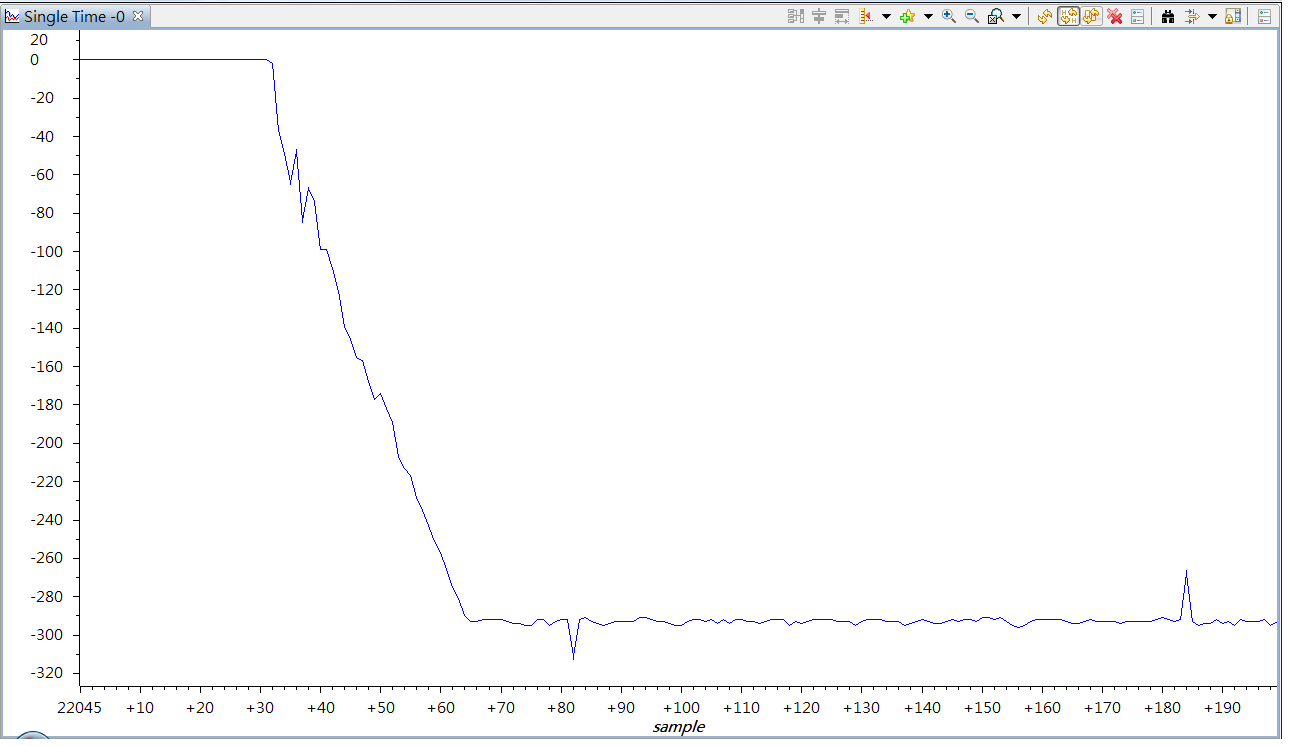
上图是CCS观察qep_posspeed.SpeedRpm_fr 输出的转速值。(出现周期性归零的图形!)