Part Number: TMS320F28379D
CAN通信中,只有默认邮箱1在进行通信,其余邮箱无法正常工作。更令人奇怪的是,即使注释掉通信代码后,邮箱1也仍然通信(一个神奇的bug)
在调试CAN通信时,参考C2000example的例程,对1~5号邮箱进行了初始化
以下为初始化代码
void CAN_init()//初始化CAN通信引脚
{
GPIO_setPinConfig(GPIO_18_CANRXA);
GPIO_setPinConfig(GPIO_19_CANTXA);
CAN_initModule(CANA_BASE);
// Set up the CAN bus bit rate to 500kHz for each module
// Refer to the Driver Library User Guide for information on how to set
// tighter timing control. Additionally, consult the device data sheet
// for more information about the CAN module clocking.
//
CAN_setBitRate(CANA_BASE, DEVICE_SYSCLK_FREQ, 5000000, 16);//500Khz
// Initialize the transmit message object used for sending CAN messages.
// Message Object Parameters:
// CAN Module: A
// Message Object ID Number: 1
// Message Identifier: 0x01 数字越小 优先级越高
// Message Frame: Standard
// Message Type: Transmit
// Message ID Mask: 0x0
// Message Object Flags: None
// Message Data Length: 8 Bytes
//发送邮箱 4个16位的数据
CAN_setupMessageObject(CANA_BASE, 1, 0x01,
CAN_MSG_FRAME_STD, CAN_MSG_OBJ_TYPE_TX, 0,
CAN_MSG_OBJ_NO_FLAGS, MSG_DATA_LENGTH);
CAN_setupMessageObject(CANA_BASE, 2, 0x02,
CAN_MSG_FRAME_STD, CAN_MSG_OBJ_TYPE_TX, 0,
CAN_MSG_OBJ_NO_FLAGS, MSG_DATA_LENGTH);
CAN_setupMessageObject(CANA_BASE, 3, 0x03,
CAN_MSG_FRAME_STD, CAN_MSG_OBJ_TYPE_TX, 0,
CAN_MSG_OBJ_NO_FLAGS, MSG_DATA_LENGTH);
CAN_setupMessageObject(CANA_BASE, 4, 0x04,
CAN_MSG_FRAME_STD, CAN_MSG_OBJ_TYPE_TX, 0,
CAN_MSG_OBJ_NO_FLAGS, MSG_DATA_LENGTH);
CAN_setupMessageObject(CANA_BASE, 5, 0x05,
CAN_MSG_FRAME_STD, CAN_MSG_OBJ_TYPE_TX, 0,
CAN_MSG_OBJ_NO_FLAGS, MSG_DATA_LENGTH);
//接收邮箱
CAN_setupMessageObject(CANA_BASE, 7, 0x07,
CAN_MSG_FRAME_STD, CAN_MSG_OBJ_TYPE_RX, 0,
CAN_MSG_OBJ_NO_FLAGS, MSG_DATA_LENGTH);
CAN_startModule(CANA_BASE);
}
随后是通信代码
void communication(void)
{
// 8字节数组可以放4个16位信号,需要移位进行组合
CanFrame1[0] = ((uint16_t)(Udc * 10) >> 8) & 0xFF;
CanFrame1[1] = (uint16_t)(Udc * 10) & 0xFF;
CanFrame1[2] = ((uint16_t)((Ua + 300) * 10) >> 8) & 0xFF;
CanFrame1[3] = (uint16_t)((Ua + 300) * 10) & 0xFF;
CanFrame1[4] = ((uint16_t)((Ub + 300) * 10) >> 8) & 0xFF;
CanFrame1[5] = (uint16_t)((Ub + 300) * 10) & 0xFF;
CanFrame1[6] = ((uint16_t)((Uc + 300) * 10) >> 8) & 0xFF;
CanFrame1[7] = (uint16_t)((Uc + 300) * 10) & 0xFF;
CAN_sendMessage(CANA_BASE, 1, MSG_DATA_LENGTH, CanFrame1);
// 2号邮箱发送 Ia, Ib, Ic, Ipa
CanFrame2[0] = ((uint16_t)((Ia + 40) * 10) >> 8) & 0xFF;
CanFrame2[1] = (uint16_t)((Ia + 40) * 10) & 0xFF;
CanFrame2[2] = ((uint16_t)((Ib + 40) * 10) >> 8) & 0xFF;
CanFrame2[3] = (uint16_t)((Ib + 40) * 10) & 0xFF;
CanFrame2[4] = ((uint16_t)((Ic + 40) * 10) >> 8) & 0xFF;
CanFrame2[5] = (uint16_t)((Ic + 40) * 10) & 0xFF;
CanFrame2[6] = ((uint16_t)((Ipa + 40) * 10) >> 8) & 0xFF;
CanFrame2[7] = (uint16_t)((Ipa + 40) * 10) & 0xFF;
CAN_sendMessage(CANA_BASE, 2, MSG_DATA_LENGTH, CanFrame2);
// while(!(HWREGH(CANA_BASE + CAN_O_ES) & CAN_ES_TXOK));
// 3号邮箱发送 Ina, Ipb, Inb, Ipc
CanFrame3[0] = ((uint16_t)((Ina + 40) * 10) >> 8) & 0xFF;
CanFrame3[1] = (uint16_t)((Ina + 40) * 10) & 0xFF;
CanFrame3[2] = ((uint16_t)((Ipb + 40) * 10) >> 8) & 0xFF;
CanFrame3[3] = (uint16_t)((Ipb + 40) * 10) & 0xFF;
CanFrame3[4] = ((uint16_t)((Inb + 40) * 10) >> 8) & 0xFF;
CanFrame3[5] = (uint16_t)((Inb + 40) * 10) & 0xFF;
CanFrame3[6] = ((uint16_t)((Ipc + 40) * 10) >> 8) & 0xFF;
CanFrame3[7] = (uint16_t)((Ipc + 40) * 10) & 0xFF;
CAN_sendMessage(CANA_BASE, 3, MSG_DATA_LENGTH, CanFrame3);
// 4号邮箱发送 Inc, average_Aarm, average_Barm, average_Carm
CanFrame4[0] = ((uint16_t)((Inc + 40) * 10) >> 8) & 0xFF;
CanFrame4[1] = (uint16_t)((Inc + 40) * 10) & 0xFF;
CanFrame4[2] = ((uint16_t)((average_Aarm + 40) * 10) >> 8) & 0xFF;
CanFrame4[3] = (uint16_t)((average_Aarm + 40) * 10) & 0xFF;
CanFrame4[4] = ((uint16_t)((average_Barm + 40) * 10) >> 8) & 0xFF;
CanFrame4[5] = (uint16_t)((average_Barm + 40) * 10) & 0xFF;
CanFrame4[6] = ((uint16_t)((average_Carm + 40) * 10) >> 8) & 0xFF;
CanFrame4[7] = (uint16_t)((average_Carm + 40) * 10) & 0xFF;
CAN_sendMessage(CANA_BASE, 4, MSG_DATA_LENGTH, CanFrame4);
// 5号邮箱发送 ABC 调制波信号
CanFrame5[0] = (A_modu_12000 >> 8) & 0xFF;
CanFrame5[1] = A_modu_12000 & 0xFF;
CanFrame5[2] = (B_modu_12000 >> 8) & 0xFF;
CanFrame5[3] = B_modu_12000 & 0xFF;
CanFrame5[4] = (C_modu_12000 >> 8) & 0xFF;
CanFrame5[5] = C_modu_12000 & 0xFF;
CanFrame5[6] = ((uint16_t)((Theta + 100) * 10) >> 8) & 0xFF;
CanFrame5[7] = ((uint16_t)((Theta + 100) * 10)) & 0xFF;
CAN_sendMessage(CANA_BASE, 5, MSG_DATA_LENGTH, CanFrame5);
// 7号邮箱接收
if(HWREGH(CANA_BASE + CAN_O_ES) & CAN_ES_RXOK)
{
CAN_readMessage(CANA_BASE, 7, CanRecFrame);
disable = ((uint16_t)CanRecFrame[0] << 8) | CanRecFrame[1];
status = ((uint16_t)CanRecFrame[2] << 8) | CanRecFrame[3];
Uac_ref = ((uint16_t)CanRecFrame[4] << 8) | CanRecFrame[5];
pre_flag = ((uint16_t)CanRecFrame[6] << 8) | CanRecFrame[7];
}
}
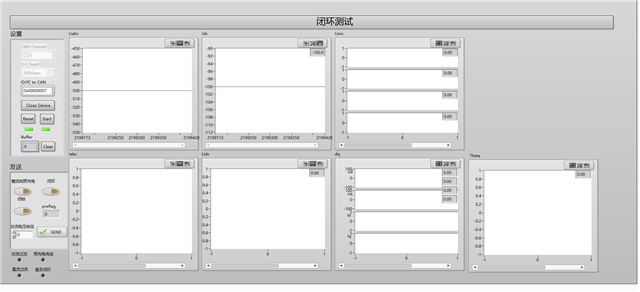
以下是实验现象,其中Uabc与Idc(实际为Idc中)能够正常接收(邮箱1),其余部分无法同步,观察can帧信号后也发现邮箱ID始终为1;
即使注释掉communication函数,邮箱1仍然发送。这个是什么原因导致的呢?