Part Number: TMS320F280039C
Other Parts Discussed in Thread: C2000WARE
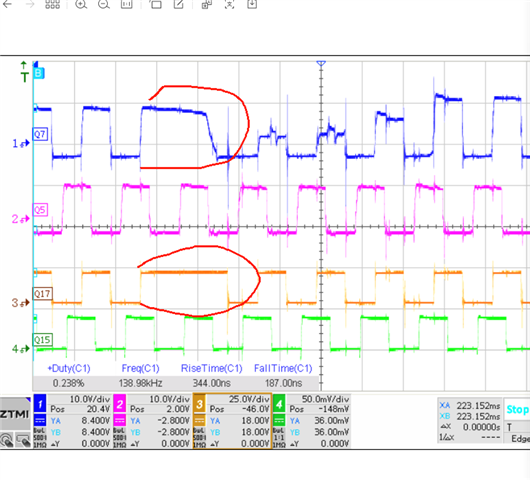
按照tida_010054方案配置DAB驱动程序,算法控制移相时,移相比例在从大于50%到小于50%切换时,会出现PWM丢失问题
Part Number: TMS320F280039C
Other Parts Discussed in Thread: C2000WARE
按照tida_010054方案配置DAB驱动程序,算法控制移相时,移相比例在从大于50%到小于50%切换时,会出现PWM丢失问题