大家好,目前在做直流无刷转速电流双闭环调速,遇到了一个问题,电机在低速的时候抖动,高速的时候动态响应还是可以的,
控制电路、驱动电路、代码、上位机程序是自己弄的,处理器TMS320F2812
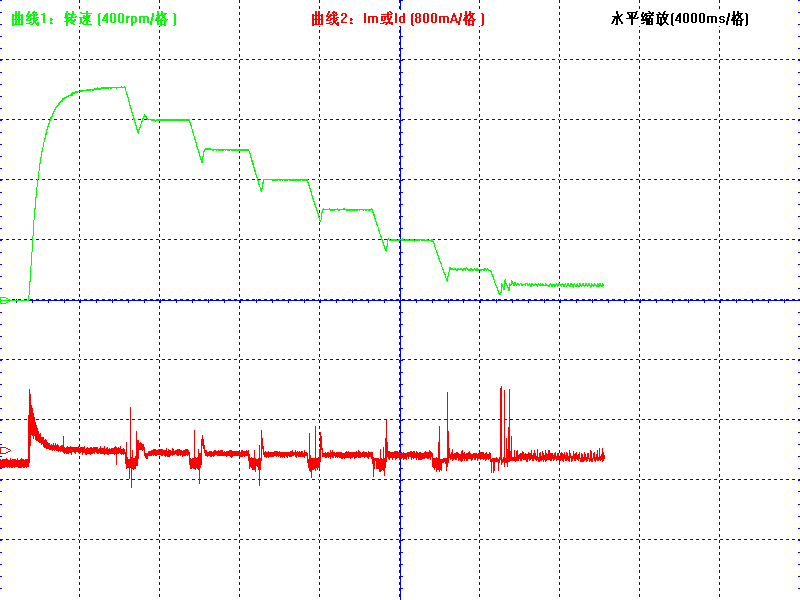
我测试的电机转速及母线电流的动态响应如下图所示:
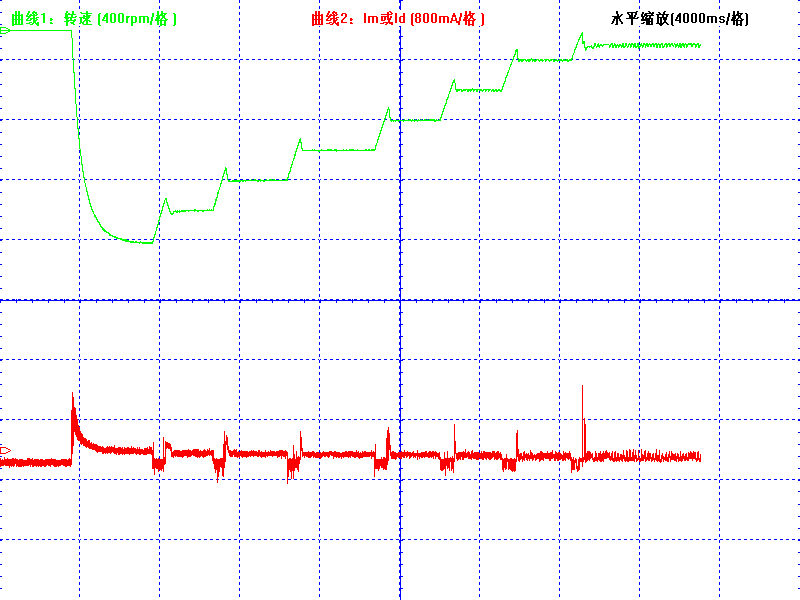
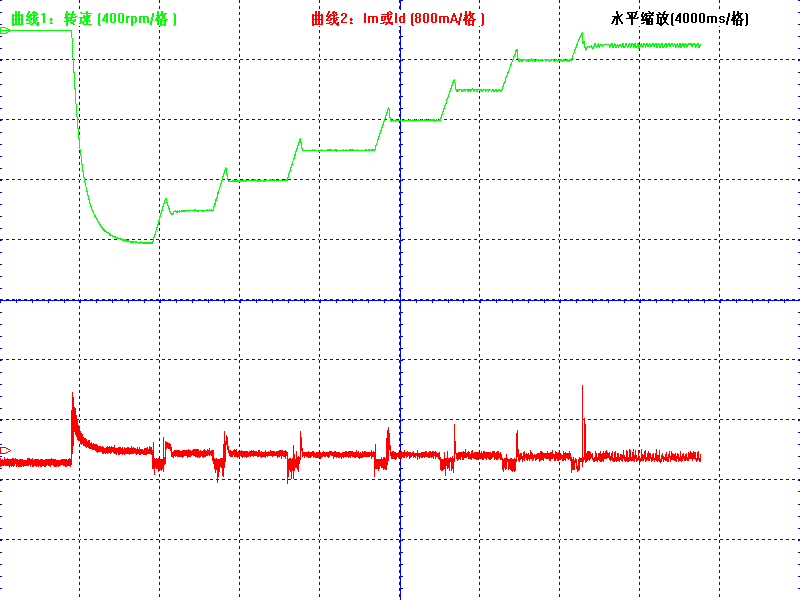
反转情况类似:
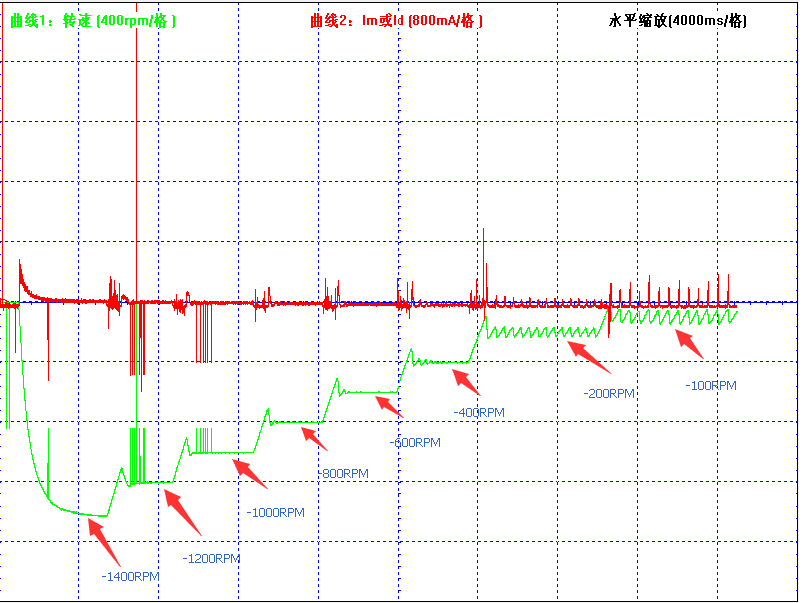
以上曲线的中的比较大的尖峰是上位机软件设计问题,有丢包的,大家暂时忽略吧。
实验时,采用单相不可控整流,调压器输出AC:200V。无刷机是5对极的,功率200W左右。
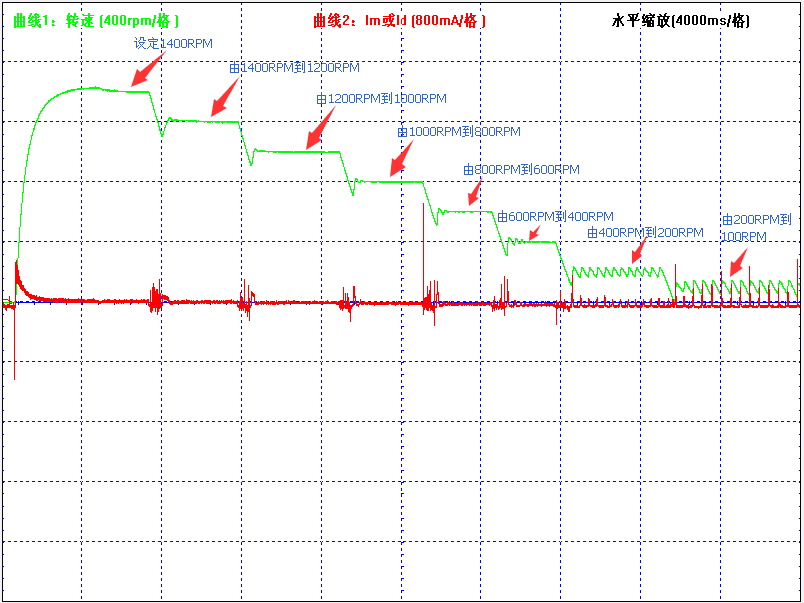
从上述曲线中可以看出,转速到达200RPM的时候可是出现周期性的震荡,高速时动态响应正常;
当震荡出现时,我试着降低调压器输出,最终电机也是可以达到稳态的,且与设定值一致,可以达到闭环控制的效果,由此看来,感觉不像是PI参数的问题。
不过,我的算法中确实只有一组PI参数。
请问直流无刷电机转速电流双闭环控制时需要考虑母线电压吗?
算法结构描述如下:
1. 设置5KHz的timer,timer周期中断启动ADC;
2. 使能捕获中断,在捕获中断中做换相处理;
3. 使能ADC中断,在ADC中断中作数据采集及双闭环算法控制
采集母线电流,用的电流传感器;闭环转速计算没有用霍尔传感器做,用的2048线光电编码器
大家也帮我检查下算法结构有问题吗?
多谢!!!