Part Number: TMS320F280049C
Other Parts Discussed in Thread: TIDM-02000, SYSCONFIG, PMP23126, C2000WARE
我现在是用F280049做移相全桥的峰值电流控制,参考了TIDM-02000的控制逻辑。使用CMPSS4来作为比较器输出,EPWM1为超前桥臂固定不动,EPWM2为滞后桥臂使用DCEVT来触发2A和2B的动作。
当前测试为,在CMPSS4的DCA使用斜坡发生器来进行DAC输出电压的下降。使用信号发生器在B4口固定输入一个电压,通过调节这个电压应该能够得到不同的输出移相角。
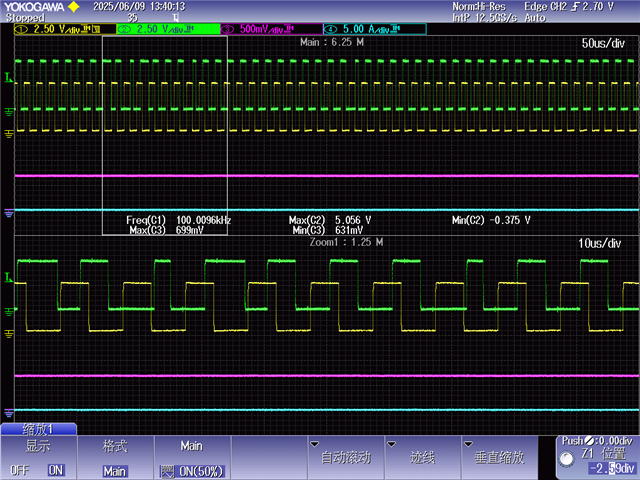
发现在特定输入电压的情况下会发生动作异常,如下图,其中黄色为EPWM1A,绿色为EPWM2A,可以看到出现了一个窄脉冲出现比较频繁(当前输入为615mV)由于驱动是使用变压器进行隔离,这个情况多次出现会导致Mos驱动电压异常,导致控制异常。
在实际使用峰值电流运行时候同样会出现这样的问题。请问是配置上有问题,还是芯片逻辑出现异常?
当前配置用的sysconfig文件如附件。