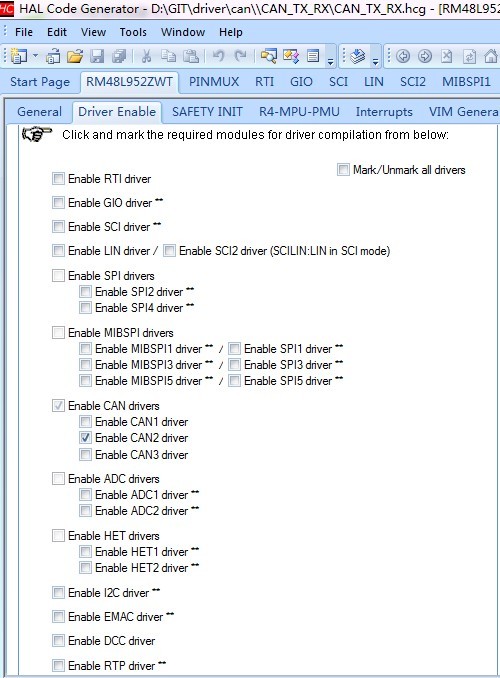
1.用HALCoGen驱动代码生成工具,生成步骤如下:
(1)图一:
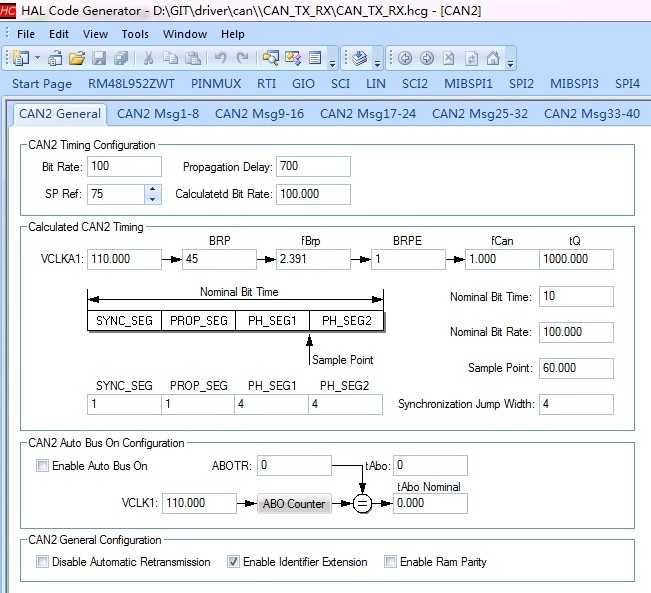
(2)图二 传输速率是 bit rate: 100;
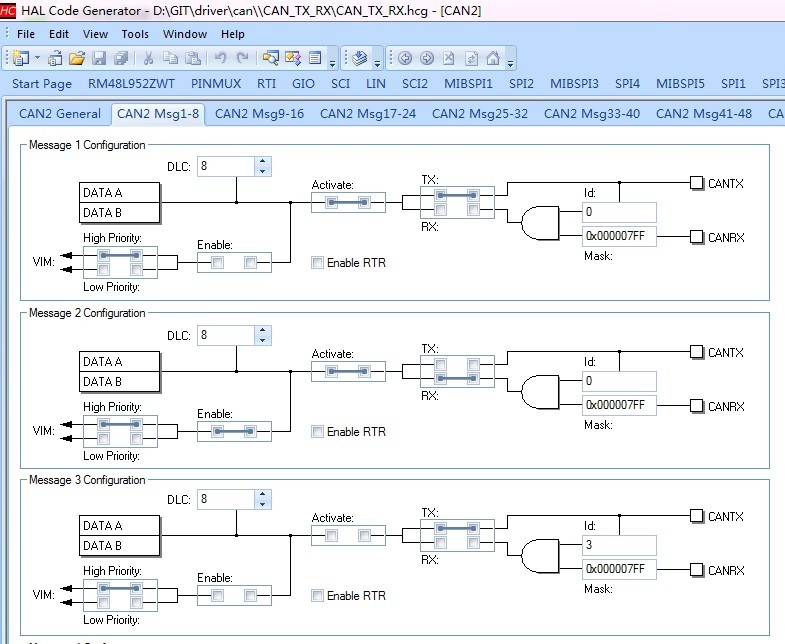
(3)图三 CAN2 Message1 配置:CANTX, 无中断 , CAN2 Message2 配置: CANRX VIM 中断.
(4)图4 中断设置
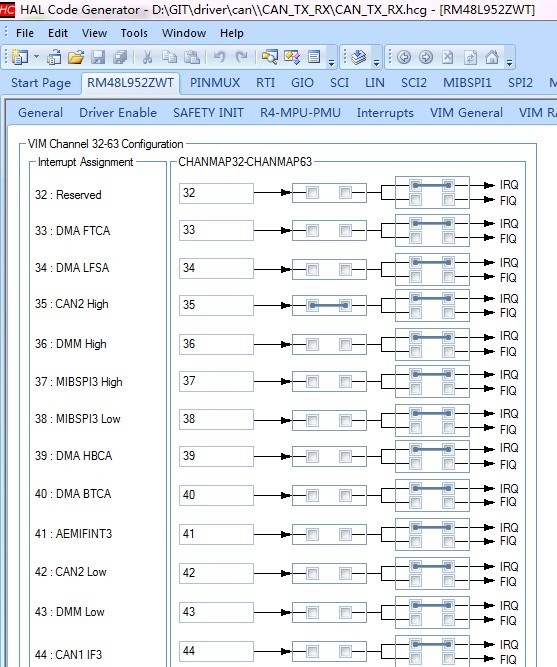
以上配置后生成代码..
“主函数 sys_main.c ”代码如下:
/* Include Files */
#include "sys_common.h"
#include "system.h"
#include "can.h"
#include "sys_core.h"
#include "esm.h"
#include "sys_vim.h"
void wait(uint32_t time);
void delay(uint32_t time);
unsigned char can_data[8] = {1, 2, 3, 4, 5, 6, 7, 8};
unsigned char can_data_ptr[8] = {0};
unsigned char ret = 0;
void main(void)
{
canInit(); /*can bus init*/
vimInit();
_enable_interrupt_(); /* enable irq interrupt in Cortex R4 */
while(1) /* continious display */
{
if(canTransmit(canREG2, canMESSAGE_BOX1, can_data) == 1) /* sender data from can1 */ 能发送数据;
{
ret = 1;
}
delay(10000000);
// if(canIsRxMessageArrived(canREG2, canMESSAGE_BOX2)) /* receiver data for can2*/
// {
/* - When a message is ready, read it into can_data */
// while(!canGetData(canREG2, canMESSAGE_BOX2, can_data_ptr));
// }
};
}
void canMessageNotification(canBASE_t *node, uint32 messageBox) //中断函数, 接收数据时.中断函数不能进入中断...
{
/* enter user code between the USER CODE BEGIN and USER CODE END. */
if(canIsRxMessageArrived(canREG2, canMESSAGE_BOX2)) /* receiver data for can2*/
{
/* - When a message is ready, read it into can_data */
while(!canGetData(canREG2, canMESSAGE_BOX2, can_data_ptr));
}
/* USER CODE BEGIN (15) */
/* USER CODE END */
}
void wait(uint32_t time)
{
time--;
}
void delay(uint32_t time)
{
int i;
for(i = 0; i < time; i++)
{
wait(10000000);
}
}
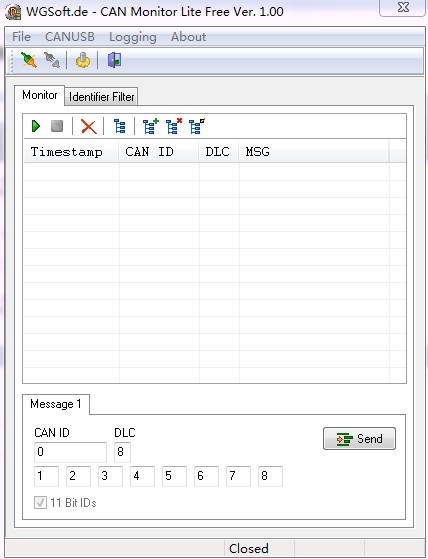
调试工具采用CANUSB..