本人河海大学常州校区计算机与信息学院学生,2009级,通信工程专业,暑假后升入大四,在实验室老师的指导下申请了一项大学生创新训练计划项目,并成功脱颖而出晋升国家级项目。在项目研究过程中,得到TI公司的支持申请下了一块MSP430的launchpad,感到非常开心,因为此项目名称为“水声传感网中的高效调制解调器的设计”,项目立足于低成本低功耗,TI公司的MSP430系列超低功耗单片机恰好符合项目需求,因此直接为本项目的研究提供了便利。经过近半年的研发,水声MODEM的初步样机已经完成并测试通过,距离可达到200m,通信速率最高2kbps,功耗最大为120mW,基本达到指标,我愿意分享自己的研究成果,以感谢TI公司一直以来对我的支持。
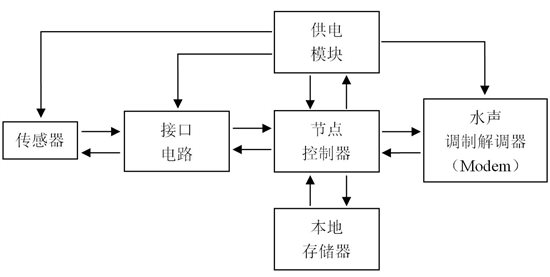
水声传感网是全球网络化技术普及的产物,它是在一定的水下区域内,通过各种传感器节点获取水下信息,并对水下节点进行声学通信和组网,最终通过特定的节点,重新以无线电和有线的形式把在覆盖区域中所获取的信息纳入岸上的常规网络,并发送给观察者的水下子网。由此可见,水声传感网中的传感节点需要拥有以下两个特点:第一,由于传感节点密度较大,必须降低单个传感节点的成本以节约整个水声传感网的建设成本;第二,传感节点往往在水下需要持续数月在无人维护的情况下工作,必须尽量降低传感节点的功耗以延长水声传感网持续工作的时间。如图1所示,一个传感节点主要由六部分组成。传感器、接口电路、节点控制器、本地存储器、水声调制解调器和供电模块。其中,完成信息收发的关键是水声调制解调器,也是所有部分中功耗最大、成本最高的部分。因此,降低水声调制解调器的功耗和成本可以有效的降低水声传感节点的整体功耗和成本。
传统的水声调制解调器体积较大、造价昂贵、功耗较高,通信距离可达数公里甚至几十公里。显然,传统的水声调制解调器不能够适应水声传感网的使用要求。为了降低水声传感网的整体成本、保证传感网长时间可靠地进行水下信息收集和传递,非常有必要研制一种具有体积小、成本低、功耗低的高效水声调制解调器。最近几年,已经有研究机构开发出了低功耗、低成本的水声调制解调器,但是这些调制解调器的数据传输速度非常慢,在水下通信时不能够支持介质访问控制层(Medium Access Control :MAC)和路由层的协议,所以能用于水下传感网的节点。在尽量低的功耗下实现尽量远的信息传送距离,就要求水声调制解调器具有很高的效率,因此,在硬件设计上需要遵循尽量以软代硬的原则,首先降低硬件的功耗和成本,在软件设计上使用尽量高效的算法,降低微处理器 (Micro Control Unit:MCU)的运算量,提高抗干扰、抗误码的能力。
由于海洋环境条件的复杂多变,如多径干扰等时变、频变、空变随机特性,使得声音信号在海洋信道中的传递存在着强烈的畸变和涨落。同时,水下声信道的环境噪声、有限频带、传输时延大等特点又极大地降低了水声通信的有效性。水下通信系统分为非相干通信系统和相干通信系统。非相干方式抗信道起伏能力强,接收端易于解调,且算法稳定性好。相干方式带宽利用率、通信速率都较高,但是相干信号的解调需要载波精确的同步,这在恶劣的水下声信道中是不易实现的。根据水下对讲机系统通信速率低、工作环境随机且复杂的特点,本发明使用了非相干通信系统。非相干通信系统多采用FSK的调制解调方式,基于能量检测的非相干FSK方式的最大优点是通信的可靠性高。由于水声信道的混响与起伏特性,信号的相位与幅度都收到严重的畸变。而基于能量检测的FSK方式对相位的畸变是不敏感的。而且对于非相干方式解调而言,通过正交双通道的处理,随机相位抖动是可以在基带得以消除的。FSK是用不同频率的载波来传递数字消息的。2FSK方式则是用两个不同频率的载波代表数字信号中的两个电平,也就是说,将“1”和“0”这两个不同符号所对应的消息载荷在两个不同的信号频率上。
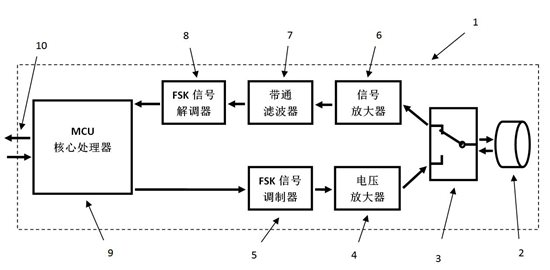
最终,水声MDOEM的设计框图如下图所示。