Other Parts Discussed in Thread: TMP112, MSP430FR2433
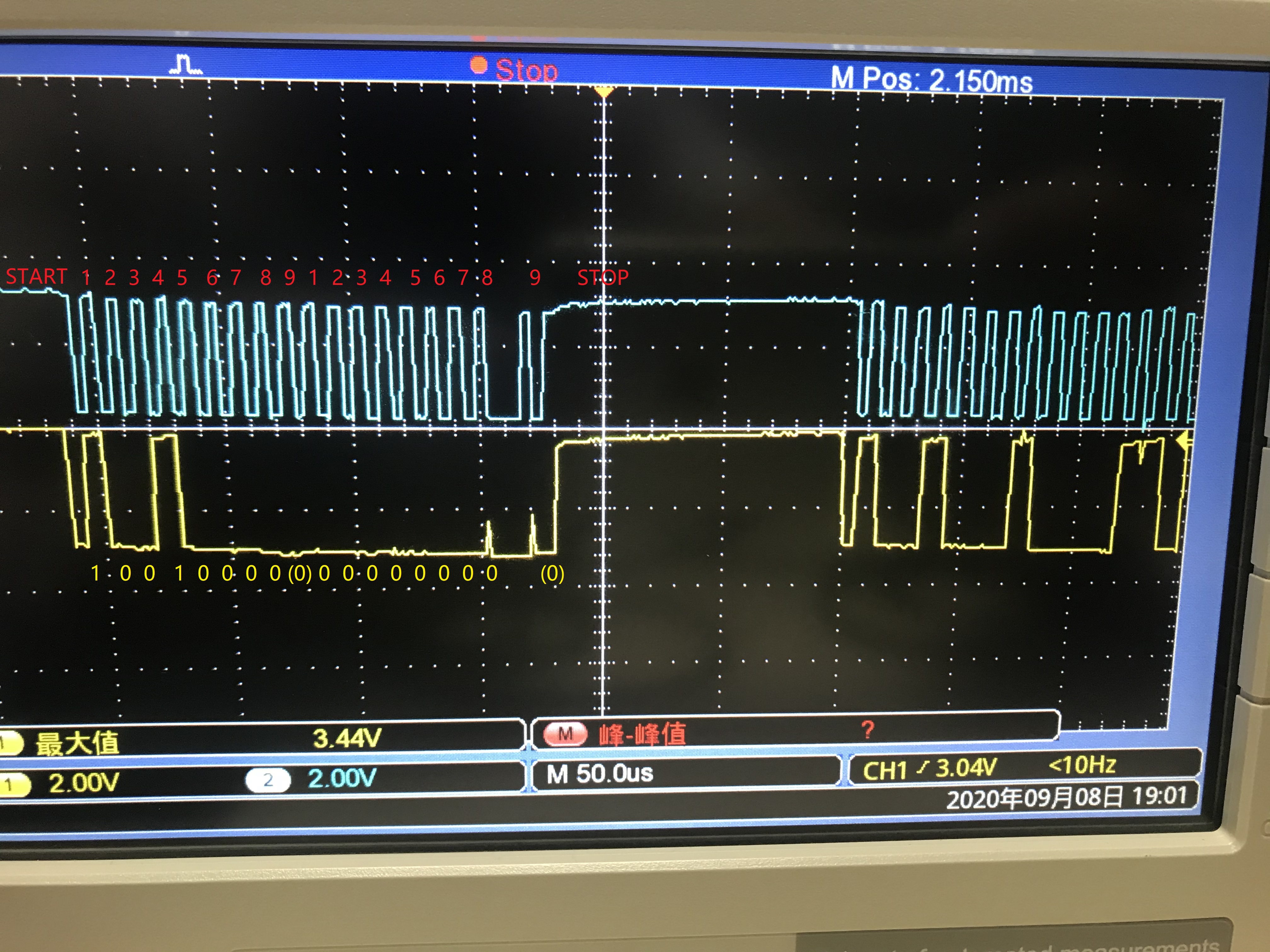
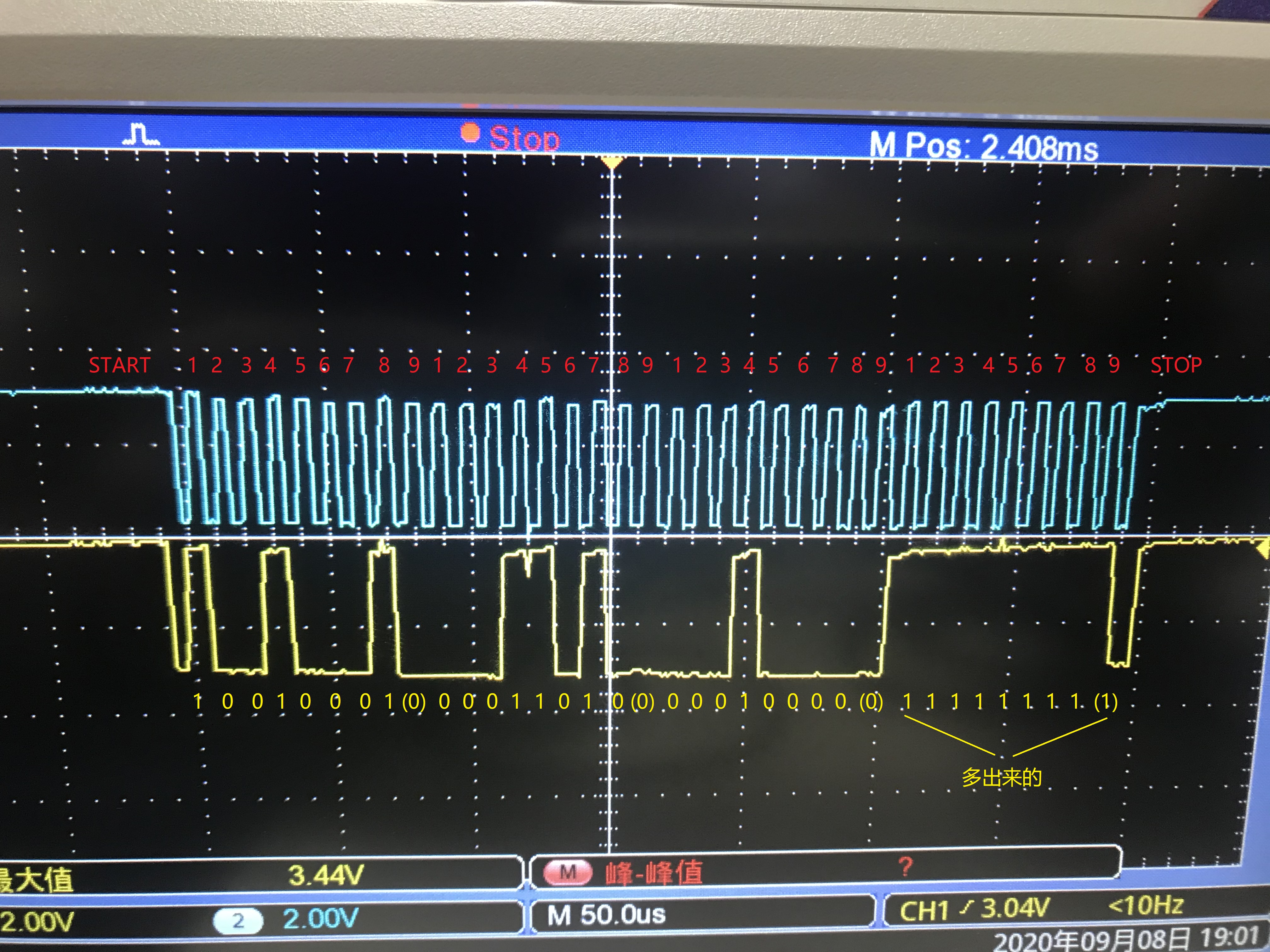
最近用MSP430FR2433+TMP112测试,发现一个很奇怪的问题,在读取TMP112的温度寄存器的2字节数据后,又有9个时钟信号,对应的·SDA一直是高电平,这时UCB0RXBUF里面会变成0xFF,而且必须把这个0xFF给读取出来,否则第二次读取的话发送开始信号后无法进入中断。一直没找到问题所在。
IIC驱动函数如下(参考官方例程):
#include "iic.h"
/* Used to track the state of the software state machine*/
I2C_Mode MasterMode = IDLE_MODE;
/* The Register Address/Command to use*/
uint8_t TransmitRegAddr = 0;
/* ReceiveBuffer: Buffer used to receive data in the ISR
* RXByteCtr: Number of bytes left to receive
* ReceiveIndex: The index of the next byte to be received in ReceiveBuffer
* TransmitBuffer: Buffer used to transmit data in the ISR
* TXByteCtr: Number of bytes left to transfer
* TransmitIndex: The index of the next byte to be transmitted in TransmitBuffer
* */
uint8_t ReceiveBuffer[MAX_BUFFER_SIZE] = {0};
uint8_t RXByteCtr = 0;
uint8_t ReceiveIndex = 0;
uint8_t TransmitBuffer[MAX_BUFFER_SIZE] = {0};
uint8_t TXByteCtr = 0;
uint8_t TransmitIndex = 0;
//******************************************************************************
// Device Initialization *******************************************************
//******************************************************************************
void initI2C()
{
UCB0CTLW0 = UCSWRST; // Enable SW reset
UCB0CTLW0 |= UCMODE_3 | UCMST | UCSSEL__SMCLK | UCSYNC; // I2C master mode, SMCLK
UCB0BRW = 0x000A; // fSCL = SMCLK/10 = ~100kHz
UCB0I2CSA = SLAVE_ADDR; // Slave Address
UCB0CTLW0 &= ~UCSWRST; // Clear SW reset, resume operation
UCB0IE |= UCNACKIE;
}
I2C_Mode I2C_Master_ReadReg(uint8_t dev_addr, uint8_t reg_addr, uint8_t count)
{
/* Initialize state machine */
MasterMode = TX_REG_ADDRESS_MODE;
TransmitRegAddr = reg_addr;
RXByteCtr = count;
TXByteCtr = 0;
ReceiveIndex = 0;
TransmitIndex = 0;
/* Initialize slave address and interrupts */
UCB0I2CSA = dev_addr;
UCB0IFG &= ~(UCTXIFG + UCRXIFG); // Clear any pending interrupts
UCB0IE &= ~UCRXIE; // Disable RX interrupt
UCB0IE |= UCTXIE; // Enable TX interrupt
UCB0CTLW0 |= UCTR + UCTXSTT; // I2C TX, start condition
__bis_SR_register(LPM0_bits + GIE); // Enter LPM0 w/ interrupts
__no_operation(); // Set breakpoint >>here<< and
return MasterMode;
}
I2C_Mode I2C_Master_WriteReg(uint8_t dev_addr, uint8_t reg_addr, uint8_t *reg_data, uint8_t count)
{
/* Initialize state machine */
MasterMode = TX_REG_ADDRESS_MODE;
TransmitRegAddr = reg_addr;
//Copy register data to TransmitBuffer
CopyArray(reg_data, TransmitBuffer, count);
TXByteCtr = count;
RXByteCtr = 0;
ReceiveIndex = 0;
TransmitIndex = 0;
/* Initialize slave address and interrupts */
UCB0I2CSA = dev_addr;
UCB0IFG &= ~(UCTXIFG + UCRXIFG); // Clear any pending interrupts
UCB0IE &= ~UCRXIE; // Disable RX interrupt
UCB0IE |= UCTXIE; // Enable TX interrupt
UCB0CTLW0 |= UCTR + UCTXSTT; // I2C TX, start condition
__bis_SR_register(LPM0_bits + GIE); // Enter LPM0 w/ interrupts
__no_operation(); // Set breakpoint >>here<< and
return MasterMode;
}
I2C_Mode I2C_Master_ReadData(uint8_t dev_addr, uint8_t count)
{
/* Initialize state machine */
MasterMode = RX_DATA_MODE;
RXByteCtr = count;
TXByteCtr = 0;
ReceiveIndex = 0;
TransmitIndex = 0;
/* Initialize slave address and interrupts */
UCB0I2CSA = dev_addr;
UCB0IFG &= ~(UCTXIFG + UCRXIFG); // Clear any pending interrupts
UCB0IE |= UCRXIE; // Disable RX interrupt
UCB0CTLW0 &= ~UCTR; // Switch to receiver
while (UCB0CTL1 & UCTXSTP); // Ensure stop condition got sent
UCB0CTLW0 |= UCTXSTT; // I2C RX, start condition
__bis_SR_register(LPM0_bits + GIE); // Enter LPM0 w/ interrupts
__no_operation(); // Set breakpoint >>here<< and
return MasterMode;
}
void CopyArray(uint8_t *source, uint8_t *dest, uint8_t count)
{
uint8_t copyIndex = 0;
for (copyIndex = 0; copyIndex < count; copyIndex++)
{
dest[copyIndex] = source[copyIndex];
}
}
//******************************************************************************
// I2C Interrupt ***************************************************************
//******************************************************************************
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector = USCI_B0_VECTOR
__interrupt void USCI_B0_ISR(void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(USCI_B0_VECTOR))) USCI_B0_ISR (void)
#else
#error Compiler not supported!
#endif
{
//Must read from UCB0RXBUF
uint8_t rx_val = 0;
switch(__even_in_range(UCB0IV, USCI_I2C_UCBIT9IFG))
{
case USCI_NONE: break; // Vector 0: No interrupts
case USCI_I2C_UCALIFG: break; // Vector 2: ALIFG
case USCI_I2C_UCNACKIFG: // Vector 4: NACKIFG
UCB0CTL1 |= UCTXSTP; // I2C start condition
UCB0IFG = 0; // Clear All USCI_B0 flags
__bic_SR_register_on_exit(LPM0_bits); // Exit LPM
MasterMode = NACK_MODE; // State state is to receive data
break;
case USCI_I2C_UCSTTIFG: break; // Vector 6: STTIFG
case USCI_I2C_UCSTPIFG: break; // Vector 8: STPIFG
case USCI_I2C_UCRXIFG3: break; // Vector 10: RXIFG3
case USCI_I2C_UCTXIFG3: break; // Vector 12: TXIFG3
case USCI_I2C_UCRXIFG2: break; // Vector 14: RXIFG2
case USCI_I2C_UCTXIFG2: break; // Vector 16: TXIFG2
case USCI_I2C_UCRXIFG1: break; // Vector 18: RXIFG1
case USCI_I2C_UCTXIFG1: break; // Vector 20: TXIFG1
case USCI_I2C_UCRXIFG0: // Vector 22: RXIFG0
rx_val = UCB0RXBUF;
if (RXByteCtr)
{
ReceiveBuffer[ReceiveIndex++] = rx_val;
RXByteCtr--;
}
if (RXByteCtr == 1)
{
UCB0CTLW0 |= UCTXSTP;
}
else if (RXByteCtr == 0)
{
UCB0IE &= ~UCRXIE;
//UCB0IFG &=~ UCRXIFG;
rx_val = UCB0RXBUF; //这个地方不能注释,要把UCB0RXBUF里面的0xff读出来,不然连续会进不了中断
MasterMode = IDLE_MODE;
__bic_SR_register_on_exit(LPM0_bits); // Exit LPM0
}
break;
case USCI_I2C_UCTXIFG0: // Vector 24: TXIFG0
switch (MasterMode)
{
case TX_REG_ADDRESS_MODE:
UCB0TXBUF = TransmitRegAddr;
if (RXByteCtr)
MasterMode = SWITCH_TO_RX_MODE; // Need to start receiving now
else
MasterMode = TX_DATA_MODE; // Continue to transmision with the data in Transmit Buffer
break;
case SWITCH_TO_RX_MODE:
UCB0IE |= UCRXIE; // Enable RX interrupt
UCB0IE &= ~UCTXIE; // Disable TX interrupt
UCB0CTLW0 &= ~UCTR; // Switch to receiver
MasterMode = RX_DATA_MODE; // State state is to receive data
UCB0CTLW0 |= UCTXSTT; // Send repeated start
if (RXByteCtr == 1)
{
//Must send stop since this is the N-1 byte
while((UCB0CTLW0 & UCTXSTT));
UCB0CTLW0 |= UCTXSTP; // Send stop condition
}
break;
case TX_DATA_MODE:
if (TXByteCtr)
{
UCB0TXBUF = TransmitBuffer[TransmitIndex++];
TXByteCtr--;
}
else
{
//Done with transmission
UCB0CTLW0 |= UCTXSTP; // Send stop condition
MasterMode = IDLE_MODE;
UCB0IE &= ~UCTXIE; // disable TX interrupt
__bic_SR_register_on_exit(LPM0_bits); // Exit LPM0
}
break;
default:
__no_operation();
break;
}
break;
default: break;
}
}
读取函数如下:
void Tmp102_Read_Temp()
{
I2C_Mode TempMode = IDLE_MODE;
uint8_t reg_data = 0x00;
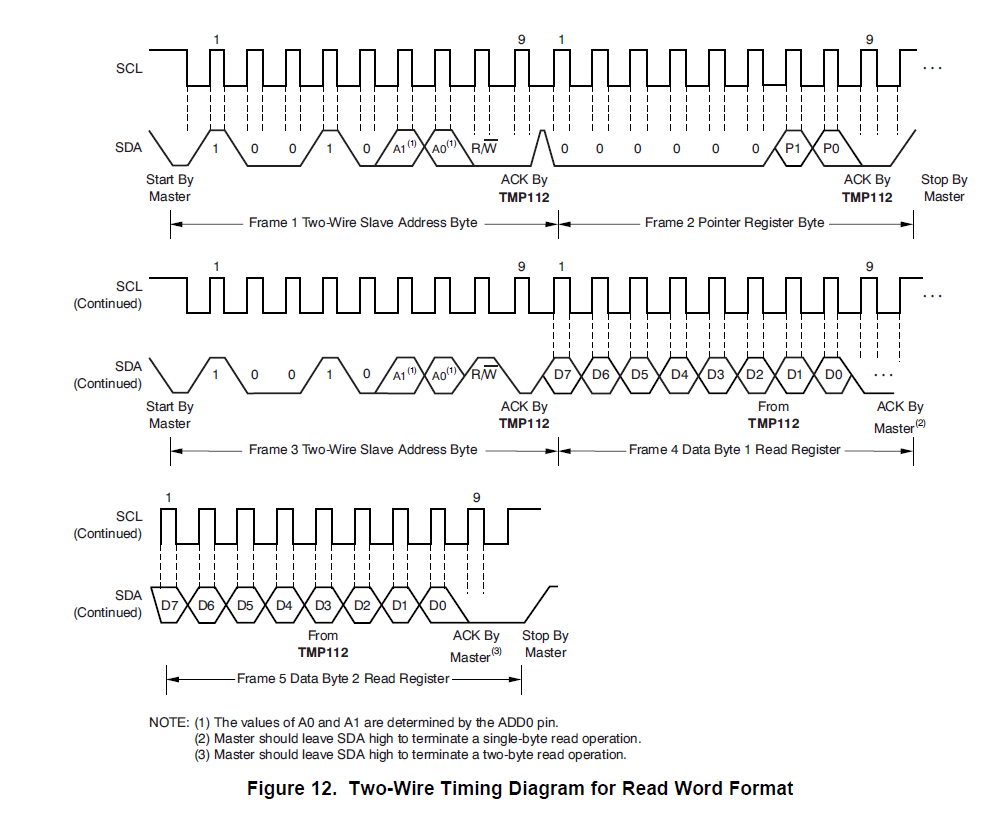
//I2C_Master_ReadReg(TMP102_ADDRESS, Temperature , 2); //也可单独能出结果,但是在发送寄存器地址后没有STOP操作与TMP112时序对不上,查看了TMP117的时序在发送寄存器地址后可以直接RESTART,不用STOP操作
I2C_Master_WriteReg(TMP102_ADDRESS, Temperature, 0 , 0);
I2C_Master_ReadData(TMP102_ADDRESS , 2);
// while(1)
// {
// TempMode = I2C_Master_WriteReg(TMP102_ADDRESS, Temperature, 0 , 0);
// TempMode = I2C_Master_ReadData(TMP102_ADDRESS , 2);
// __delay_cycles(10000);
// }
}