Part Number: MSP430FR2433
Other Parts Discussed in Thread: HDC1080
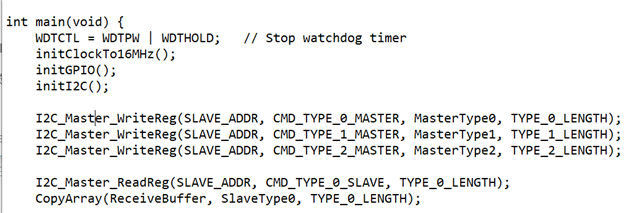
参考官方的硬件IIC程序,无法成功,调试进入中断后,立即结束,ReceiveBuffer一直都是0。单独的MSP430硬件IIC到底该如何配置
Original question:

Part Number: MSP430FR2433
Other Parts Discussed in Thread: HDC1080
参考官方的硬件IIC程序,无法成功,调试进入中断后,立即结束,ReceiveBuffer一直都是0。单独的MSP430硬件IIC到底该如何配置

 这是测量SCL引脚端的时序图,跟模拟时完全不同,不知道是代码中哪里的问题
这是测量SCL引脚端的时序图,跟模拟时完全不同,不知道是代码中哪里的问题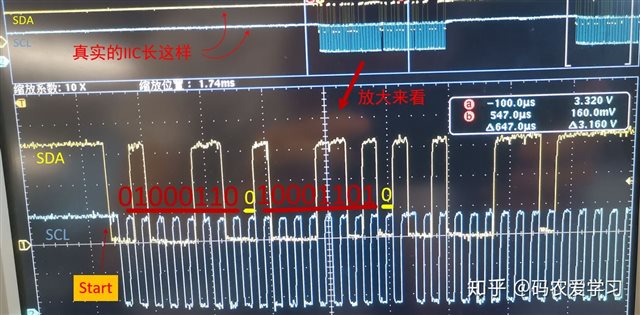
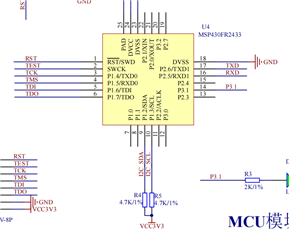 我的上拉电阻不是10k,但是应该与这无关吧
我的上拉电阻不是10k,但是应该与这无关吧