从机程序如下(官方domon):
#include <msp430x20x2.h>
char SLV_Data = 0; // Variable for transmitted data
char SLV_Addr = 0x90; // Address is 0x48<<1 for R/W
int I2C_State = 0; // State variable
void main(void)
{
WDTCTL = WDTPW + WDTHOLD; // Stop watchdog
if (CALBC1_1MHZ ==0xFF || CALDCO_1MHZ == 0xFF)
{
while(1); // If calibration constants erased
// do not load, trap CPU!!
}
BCSCTL1 = CALBC1_1MHZ; // Set DCO
DCOCTL = CALDCO_1MHZ;
P1OUT = 0xC0; // P1.6 & P1.7 Pullups
P1REN |= 0xC0; // P1.6 & P1.7 Pullups
P1DIR = 0xFF; // Unused pins as outputs
P2OUT = 0;
P2DIR = 0xFF;
USICTL0 = USIPE6+USIPE7+USISWRST; // Port & USI mode setup
USICTL1 = USII2C+USIIE+USISTTIE; // Enable I2C mode & USI interrupts
USICKCTL = USICKPL; // Setup clock polarity
USICNT |= USIIFGCC; // Disable automatic clear control
USICTL0 &= ~USISWRST; // Enable USI
USICTL1 &= ~USIIFG; // Clear pending flag
_EINT();
while(1)
{
LPM0; // CPU off, await USI interrupt
_NOP(); // Used for IAR
}
}
//******************************************************
// USI interrupt service routine
//******************************************************
#pragma vector = USI_VECTOR
__interrupt void USI_TXRX (void)
{
if (USICTL1 & USISTTIFG) // Start entry?
{
P1OUT |= 0x01; // LED on: Sequence start
I2C_State = 2; // Enter 1st state on start
}
switch(I2C_State)
{
case 0: //Idle, should not get here
break;
case 2: //RX Address
USICNT = (USICNT & 0xE0) + 0x08; // Bit counter = 8, RX Address
USICTL1 &= ~USISTTIFG; // Clear start flag
I2C_State = 4; // Go to next state: check address
break;
case 4: // Process Address and send (N)Ack
if (USISRL & 0x01) // If read...
SLV_Addr++; // Save R/W bit
USICTL0 |= USIOE; // SDA = output
if (USISRL == SLV_Addr) // Address match?
{
USISRL = 0x00; // Send Ack
P1OUT &= ~0x01; // LED off
I2C_State = 8; // Go to next state: TX data
}
else
{
USISRL = 0xFF; // Send NAck
P1OUT |= 0x01; // LED on: error
I2C_State = 6; // Go to next state: prep for next Start
}
USICNT |= 0x01; // Bit counter = 1, send (N)Ack bit
break;
case 6: // Prep for Start condition
USICTL0 &= ~USIOE; // SDA = input
SLV_Addr = 0x90; // Reset slave address
I2C_State = 0; // Reset state machine
break;
case 8: // Send Data byte
USICTL0 |= USIOE; // SDA = output
USISRL = SLV_Data; // Send data byte
USICNT |= 0x08; // Bit counter = 8, TX data
I2C_State = 10; // Go to next state: receive (N)Ack
break;
case 10:// Receive Data (N)Ack
USICTL0 &= ~USIOE; // SDA = input
USICNT |= 0x01; // Bit counter = 1, receive (N)Ack
I2C_State = 12; // Go to next state: check (N)Ack
break;
case 12:// Process Data Ack/NAck
if (USISRL & 0x01) // If Nack received...
{
P1OUT |= 0x01; // LED on: error
}
else // Ack received
{
P1OUT &= ~0x01; // LED off
SLV_Data++; // Increment Slave data
}
// Prep for Start condition
USICTL0 &= ~USIOE; // SDA = input
SLV_Addr = 0x90; // Reset slave address
I2C_State = 0; // Reset state machine
break;
}
USICTL1 &= ~USIIFG; // Clear pending flags
}
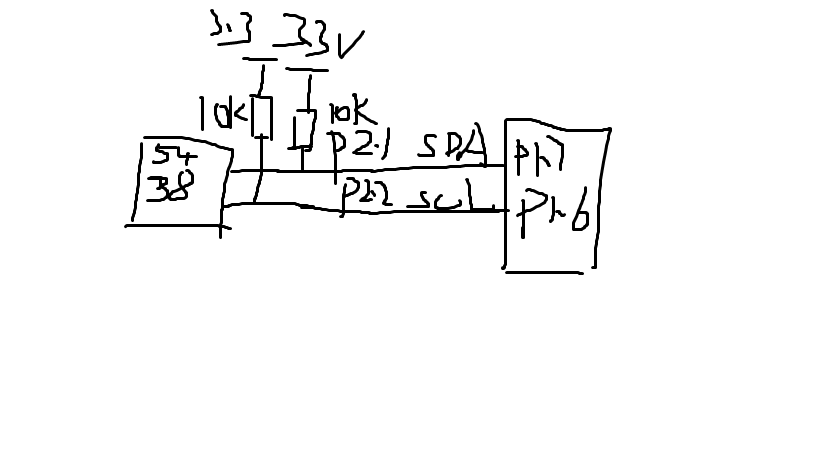
主机是f5438用的模拟口:
uint8 Get_SDA_1_Status(void) //读sda io口值
{
Set_Data_In();
if(SDA_PIN) //if(P1_0)
{
return 1;
}
else
{
return 0;
}
}
void iic_init() // icc
{
Set_SDA_1_High();
Set_SCLK_1_High();
}
void Start_I2c() //start
{
Set_SCLK_1_High();
delay_us(5);
Set_SDA_1_Low();
delay_us(5);
Set_SCLK_1_Low();
delay_us(5);
}
void Stop_I2c() // stop
{
Set_SDA_1_Low(); /*发送结束条件的数据信号*/
More_Delay_Test();
Set_SCLK_1_High(); /*结束条件建立时间大于4μs*/
More_Delay_Test();
Set_SDA_1_High(); /*发送I2C总线结束信号*/
More_Delay_Test();
}
void Ack_I2c(uchar a) //ack
{
Set_SCLK_1_Low();
More_Delay_Test();
if(a==0)
Set_SDA_1_Low(); //*在此发出应答或非应答信号
else
Set_SDA_1_High();
More_Delay_Test();
Set_SCLK_1_High();
More_Delay_Test();
Set_SCLK_1_Low(); //*清时钟线,钳住I2C总线以便继续接收
More_Delay_Test();
}
void Simulate_SendByte(uchar c)
{
uchar BitCnt;
Set_SCLK_1_Low();
for(BitCnt=0;BitCnt<8;BitCnt++) /*要传送的数据长度为8位*/
{
if((c<<BitCnt)&0x80)
Set_SDA_1_High(); /*判断发送位*/ //Set_Data_In();
else Set_SDA_1_Low();
delay_us(5); delay_us(5);
Set_SCLK_1_High(); /*置时钟线为高,通知被控器开始接收数据位*/
delay_us(5); delay_us(5);
Set_SCLK_1_Low();
delay_us(5); delay_us(5);
}
Set_SDA_1_High();
delay_us(5);
Set_Data_In();
Set_SCLK_1_High();
delay_us(5);
if(Get_SDA_1_Status()==1)
ack=0;
else
ack=1; /*判断是否接收到应答信号*/
Set_SCLK_1_Low(); //20130911
delay_us(5);
// More_Delay_Test();
//Set_SCLK_1_Low();
}
uchar Simulate_RcvByte()
{
uchar retc;
uchar BitCnt;
retc=0;
Set_Data_In();
for(BitCnt=0;BitCnt<8;BitCnt++)
{
retc=retc<<1;
Set_SCLK_1_Low(); //*置时钟线为低,准备接收数据位
More_Delay_Test();
Set_SCLK_1_High(); //*置时钟线为高使数据线上数据有效
More_Delay_Test();
if(Get_SDA_1_Status()==1)
retc = retc+1; //*读数据位,接收的数据位放入retc中
More_Delay_Test();
}
return(retc);
}
uint8 read_data()
{
Start_I2c();
Simulate_SendByte(0x90);
if(ack==0)return(0);
More_Delay_Test(); More_Delay_Test();
Simulate_SendByte(0xa1);
if(ack==0)return(0);
More_Delay_Test(); More_Delay_Test();
data=Simulate_RcvByte();
Ack_I2c(1);
Stop_I2c();
return (data);
}
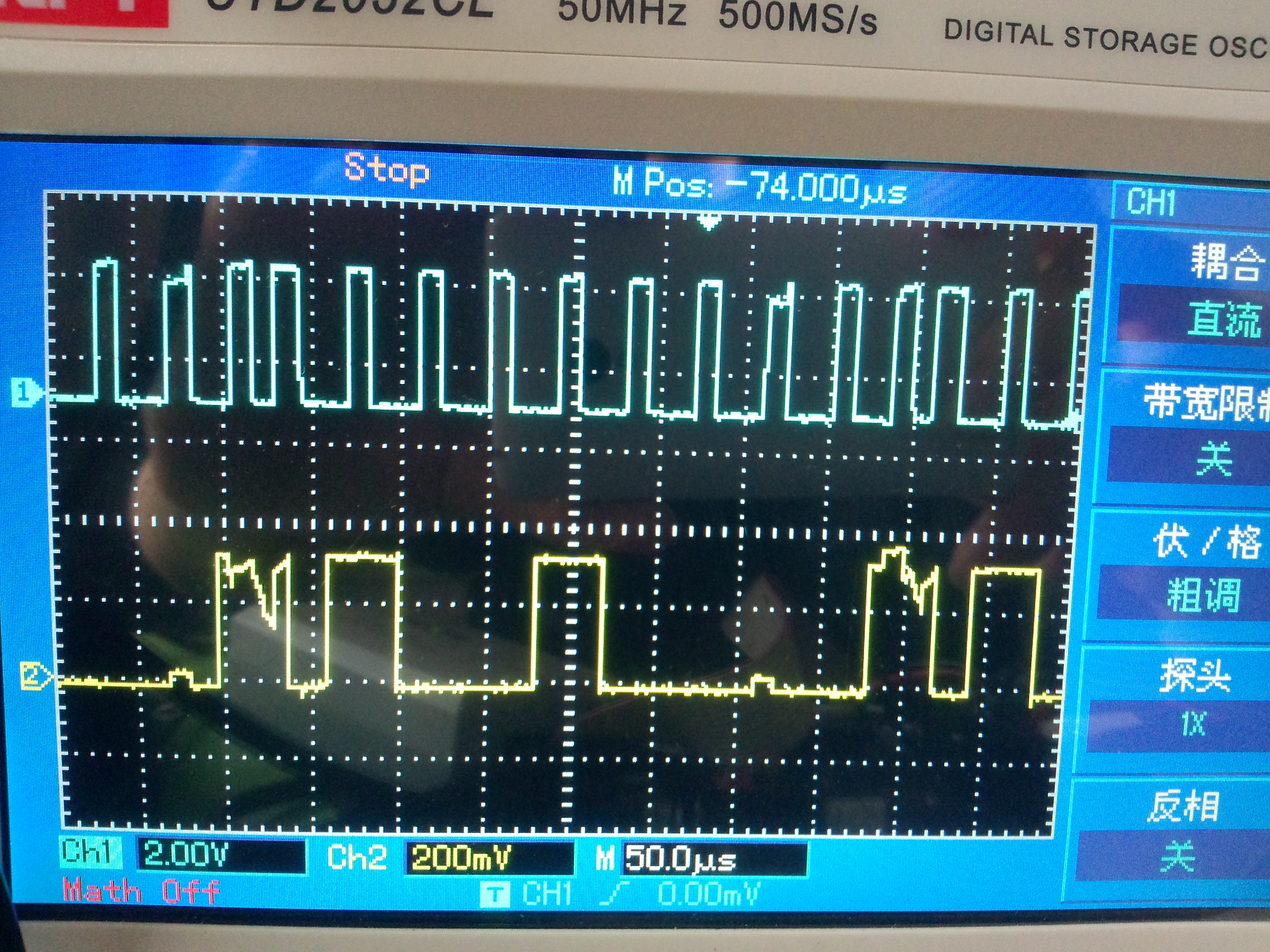
一直都收不到从机响应怎么回事啊?这段模拟的iic程序是我读取其他传感器所用的程序,直接摘抄过来的《求大神帮忙~~