If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
/* --COPYRIGHT--,BSD
* Copyright (c) 2017, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
//******************************************************************************
//! EUSCI_A0 External Loopback test using EUSCI_A_UART_init API
//!
//! Description: This demo connects TX to RX of the MSP430 UART
//! The example code shows proper initialization of registers
//! and interrupts to receive and transmit data.
//!
//! SMCLK = MCLK = BRCLK = DCOCLKDIV = ~1MHz, ACLK = 32.768kHz
//!
//!
//! MSP430FR2xx_4xx Board
//! -----------------
//! RST -| UCA0TXD|----|
//! | | |
//! | | |
//! | UCA0RXD|----|
//! | |
//!
//! This example uses the following peripherals and I/O signals. You must
//! review these and change as needed for your own board:
//! - UART peripheral
//! - GPIO Port peripheral (for UART pins)
//! - UCA0TXD
//! - UCA0RXD
//!
//! This example uses the following interrupt handlers. To use this example
//! in your own application you must add these interrupt handlers to your
//! vector table.
//! - USCI_A0_VECTOR.
//******************************************************************************
#include "driverlib.h"
#include "Board.h"
uint16_t i;
uint8_t RXData = 0, TXData = 0;
uint8_t check = 0;
void main(void)
{
//Stop Watchdog Timer
WDT_A_hold(WDT_A_BASE);
//__disable_interrupt();
//Set ACLK = REFOCLK with clock divider of 1
CS_initClockSignal(CS_ACLK,CS_REFOCLK_SELECT,CS_CLOCK_DIVIDER_1);
//Set SMCLK = DCO with frequency divider of 1
CS_initClockSignal(CS_SMCLK,CS_DCOCLKDIV_SELECT,CS_CLOCK_DIVIDER_1);
//Set MCLK = DCO with frequency divider of 1
CS_initClockSignal(CS_MCLK,CS_DCOCLKDIV_SELECT,CS_CLOCK_DIVIDER_1);
//Configure UART pins
GPIO_setAsPeripheralModuleFunctionInputPin(
GPIO_PORT_UCA0TXD,
GPIO_PIN_UCA0TXD,
GPIO_FUNCTION_UCA0TXD
);
GPIO_setAsPeripheralModuleFunctionInputPin(
GPIO_PORT_UCA0RXD,
GPIO_PIN_UCA0RXD,
GPIO_FUNCTION_UCA0RXD
);
/*
* Disable the GPIO power-on default high-impedance mode to activate
* previously configured port settings
*/
PMM_unlockLPM5();
//Configure UART
//SMCLK = 1MHz, Baudrate = 115200
//UCBRx = 8, UCBRFx = 0, UCBRSx = 0xD6, UCOS16 = 0
EUSCI_A_UART_initParam param = {0};
param.selectClockSource = EUSCI_A_UART_CLOCKSOURCE_SMCLK;
param.clockPrescalar = 8;
param.firstModReg = 0;
param.secondModReg = 0xD6;
param.parity = EUSCI_A_UART_NO_PARITY;
param.msborLsbFirst = EUSCI_A_UART_LSB_FIRST;
param.numberofStopBits = EUSCI_A_UART_ONE_STOP_BIT;
param.uartMode = EUSCI_A_UART_MODE;
param.overSampling = EUSCI_A_UART_LOW_FREQUENCY_BAUDRATE_GENERATION;
if (STATUS_FAIL == EUSCI_A_UART_init(EUSCI_A0_BASE, ¶m)) {
return;
}
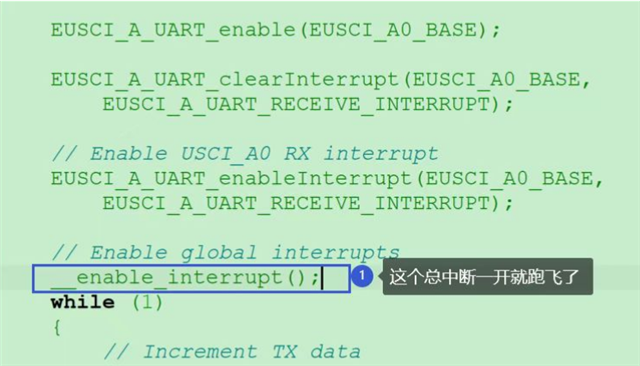
EUSCI_A_UART_enable(EUSCI_A0_BASE);
EUSCI_A_UART_clearInterrupt(EUSCI_A0_BASE,
EUSCI_A_UART_RECEIVE_INTERRUPT);
// Enable USCI_A0 RX interrupt
EUSCI_A_UART_enableInterrupt(EUSCI_A0_BASE,
EUSCI_A_UART_RECEIVE_INTERRUPT);
// Enable global interrupts
//__enable_interrupt();
while (1)
{
// Increment TX data
TXData = TXData+1;
// Load data onto buffer
EUSCI_A_UART_transmitData(EUSCI_A0_BASE, TXData);
while(check != 1);
check = 0;
}
}
//******************************************************************************
//
//This is the USCI_A0 interrupt vector service routine.
//
//******************************************************************************
//#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector=USCI_A0_VECTOR
__interrupt
//#elif defined(__GNUC__)
//__attribute__((interrupt(USCI_A0_VECTOR)))
//#endif
void EUSCI_A0_ISR(void)
{
switch(__even_in_range(UCA0IV,USCI_UART_UCTXCPTIFG))
{
case USCI_NONE: break;
case USCI_UART_UCRXIFG:
RXData = EUSCI_A_UART_receiveData(EUSCI_A0_BASE);
// Check value
if(!(RXData == TXData))
{
while(1);
}
check =1;
break;
case USCI_UART_UCTXIFG: break;
case USCI_UART_UCSTTIFG: break;
case USCI_UART_UCTXCPTIFG: break;
}
}
case USCI_UART_UCRXIFG: RXData = EUSCI_A_UART_receiveData(EUSCI_A0_BASE); // Check value if(!(RXData == TXData)) { // Set flag indicating data mismatch check = 1; } break;