

Part Number: AM2432
Hello,
We used the AM2432 chip to debug the EtherCAT communication. The following is the routine we used:

The project modified based on this routine can perform normal EtherCAT communication, and ESM can switch to the OP state.
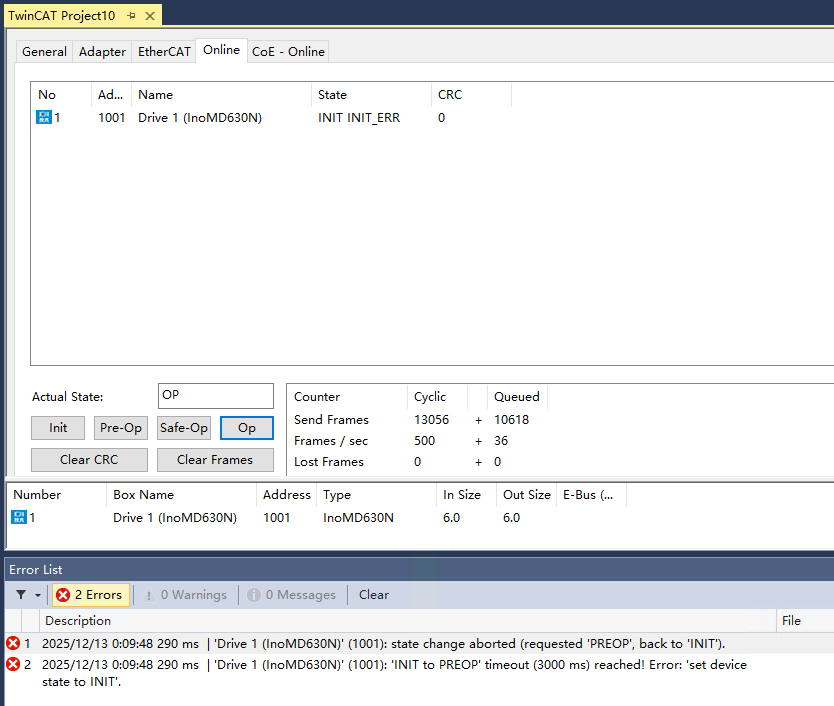
However, after transplanting the EtherCAT-related code of this project to our product project, the EtherCAT communication failed. Our project were running on core1, and the ESM status remained as init and could not be switched to preop.The TwinCAT interface is displayed as follows:
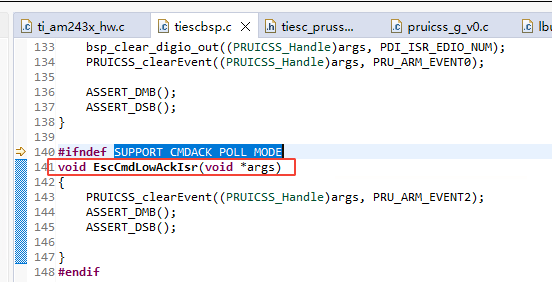
Our online debug revealed that this interrupt function cannot be executed, and we suspected it was a problem with the interrupt.
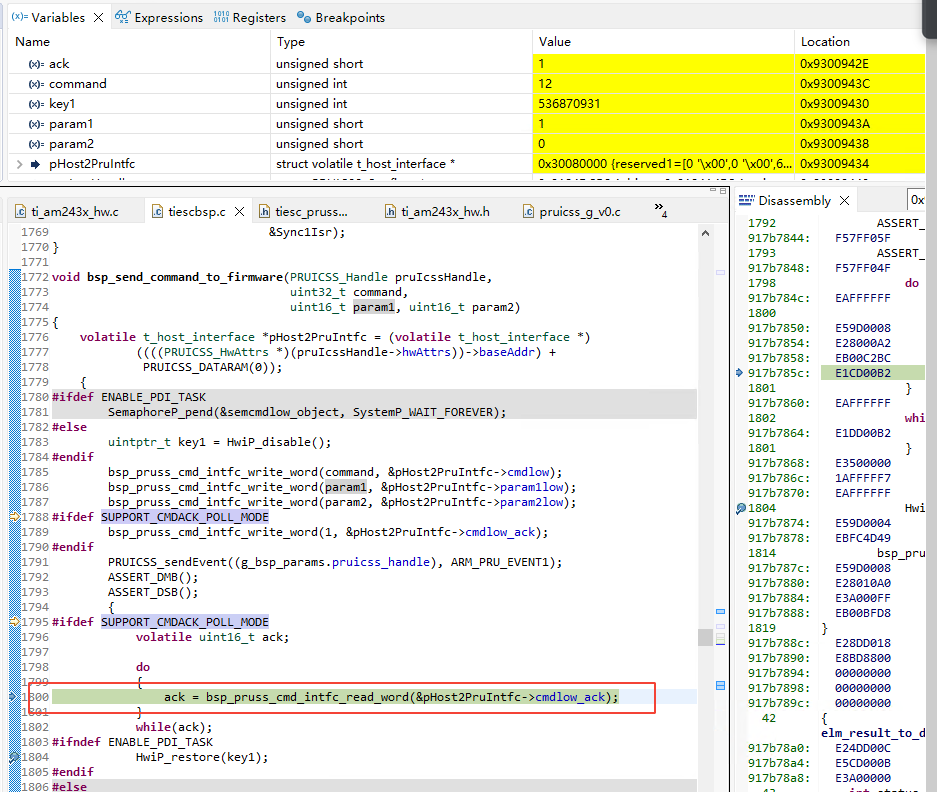
We have carried out the following verification. we turned on SUPPORTED_CMDACK_POLL_MODE
and it was found that the program could exit the while loop for the first time, but then it kept in a dead loop and could not exit.
We sincerely hope that you can help us solve this problem.
Thank you.
