

Other Parts Discussed in Thread: HALCOGEN
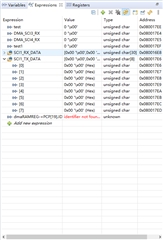
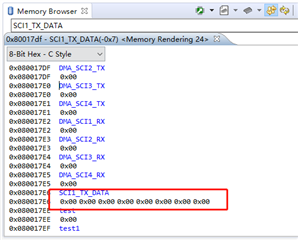
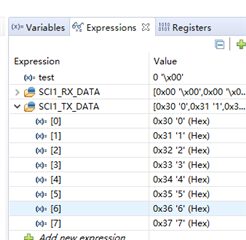
全局定义的变量本身带有赋值,但调试时发现程序运行后全局变量全部变为了0.
运行发现:
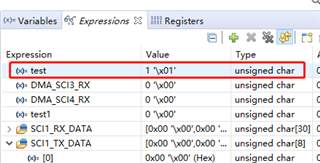
手动改变全局变量的值。
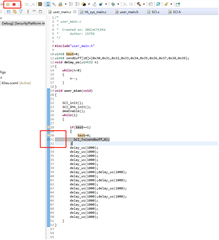
 但是程序中进入不了该条件判断。
但是程序中进入不了该条件判断。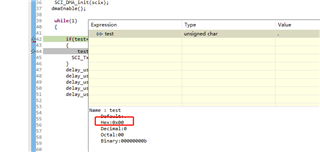 。可以可定的是变量test没有在其它处调用。
。可以可定的是变量test没有在其它处调用。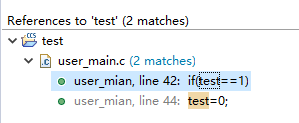
This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
全局定义的变量本身带有赋值,但调试时发现程序运行后全局变量全部变为了0.
运行发现:
手动改变全局变量的值。
但是程序中进入不了该条件判断。。可以可定的是变量test没有在其它处调用。
主要功能是SCI1的DMA发送和接收。
/** HL_sys_main.c **/
int main(void)
{
/* USER CODE BEGIN (3) */
user_mian();
/* USER CODE END */
return 0;
}
/** user_main.c **/
#include"user_main.h"
uint8 test=0;
uint8 sendbuff[10]={0x30,0x31,0x32,0x33,0x34,0x35,0x36,0x37,0x38,0x39};
void delay_us(uint32 n)
{
while(n>0)
{
n--;
}
}
void user_mian(void)
{
SCI_init();
SCI_DMA_init();
dmaEnable();
while(1)
{
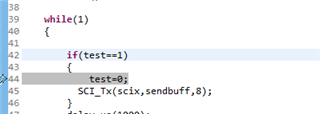
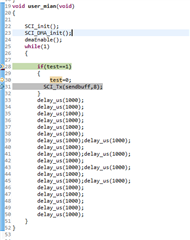
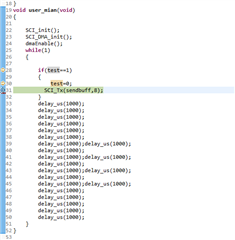
if(test==1)
{
test=0;
SCI_Tx(sendbuff,8);
}
delay_us(1000);
delay_us(1000);
delay_us(1000);
delay_us(1000);
delay_us(1000);
delay_us(1000);
delay_us(1000);delay_us(1000);
delay_us(1000);
delay_us(1000);delay_us(1000);
delay_us(1000);
delay_us(1000);delay_us(1000);
delay_us(1000);
delay_us(1000);delay_us(1000);
delay_us(1000);
delay_us(1000);
delay_us(1000);
delay_us(1000);
delay_us(1000);
}
}
/** user_main.h **/
#ifndef COMMUNICATION_USER_MAIN_H_
#define COMMUNICATION_USER_MAIN_H_
#include"SCI.h"
#include"HL_sci.h"
#include"HL_rti.h"
#include"HL_reg_sci.h"
#include "HL_mibspi.h"
#include "HL_sys_vim.h"
#include "HL_reg_dma.h"
#include "HL_sys_dma.h"
#include "HL_reg_lin.h"
#include "HL_sys_core.h"
void user_mian(void);
#endif /* COMMUNICATION_USER_MAIN_H_ */
/** SCI.c **/
#include"SCI.h"
#include"HL_sci.h"
#include"HL_reg_sci.h"
#include "HL_mibspi.h"
#include "HL_sys_vim.h"
#include "HL_reg_dma.h"
#include "HL_sys_dma.h"
#include "HL_lin.h"
#include "HL_reg_lin.h"
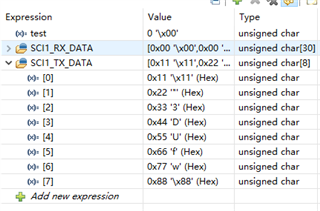
uint8 SCI1_RX_DATA[SCI1_RX_DATA_LEN];
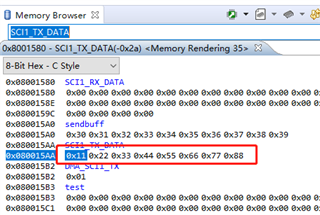
volatile uint8 SCI1_TX_DATA[8]={0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88};
bool DMA_SCI1_TX=true;
void SCI_init(void)
{
uint8 parity=0 ;
uint8 bilen=0 ;
uint8 stopbits=0 ;
parity=0;
bilen=8;
stopbits=1;
float64 vclk = 75.000 * 1000000.0;
uint32 f = 16U;
uint32 temp;
float64 temp2;
/*SAFETYMCUSW 96 S MR:6.1 <APPROVED> "Calculations including int and float cannot be avoided" */
temp = (f*(9600));
temp2 = ((vclk)/((float64)temp))-1U;
temp2 =(uint32) ((temp2 + 0.5)/1); /* Rounding-off to the closest integer */
sciREG1->GCR0 = 0U;
sciREG1->GCR0 = 1U;
/** - Disable all interrupts */
sciREG1->CLEARINT = 0xFFFFFFFFU;
sciREG1->CLEARINTLVL = 0xFFFFFFFFU;
/** - global control 1 */
sciREG1->GCR1 = (uint32)((uint32)1U << 25U) /* enable transmit */
| (uint32)((uint32)1U << 24U) /* enable receive */
| (uint32)((uint32)1U << 5U) /* internal clock (device has no clock pin) */
| (uint32)((uint32)(stopbits-1U) << 4U) /* number of stop bits */
| (uint32)((uint32)(parity>1? 1:0) << 3U) /* even parity, otherwise odd */
| (uint32)((uint32)(parity>0? 1:0) << 2U) /* enable parity */
| (uint32)((uint32)1U << 1U); /* asynchronous timing mode */
/** - set baudrate */
sciREG1->BRS =(uint32)((uint32)temp2 & 0x00FFFFFFU); /* baudrate */
/** - transmission length */
sciREG1->FORMAT = bilen - 1U; /* length */
/** - set SCI1 pins functional mode */
sciREG1->PIO0 = (uint32)((uint32)1U << 2U) /* tx pin */
| (uint32)((uint32)1U << 1U); /* rx pin */
/** - set SCI1 pins default output value */
sciREG1->PIO3 = (uint32)((uint32)0U << 2U) /* tx pin */
| (uint32)((uint32)0U << 1U); /* rx pin */
/** - set SCI1 pins output direction */
sciREG1->PIO1 = (uint32)((uint32)0U << 2U) /* tx pin */
| (uint32)((uint32)0U << 1U); /* rx pin */
/** - set SCI1 pins open drain enable */
sciREG1->PIO6 = (uint32)((uint32)0U << 2U) /* tx pin */
| (uint32)((uint32)0U << 1U); /* rx pin */
/** - set SCI1 pins pullup/pulldown enable */
sciREG1->PIO7 = (uint32)((uint32)0U << 2U) /* tx pin */
| (uint32)((uint32)0U << 1U); /* rx pin */
/** - set SCI1 pins pullup/pulldown select */
sciREG1->PIO8 = (uint32)((uint32)1U << 2U) /* tx pin */
| (uint32)((uint32)1U << 1U); /* rx pin */
/** - set interrupt level */
sciREG1->SETINTLVL = (uint32)((uint32)0U << 26U) /* Framing error */
| (uint32)((uint32)0U << 25U) /* Overrun error */
| (uint32)((uint32)0U << 24U) /* Parity error */
| (uint32)((uint32)0U << 9U) /* Receive */
| (uint32)((uint32)0U << 8U) /* Transmit */
| (uint32)((uint32)0U << 1U) /* Wakeup */
| (uint32)((uint32)0U << 0U); /* Break detect */
/** - set interrupt enable */
sciREG1->SETINT = (uint32)((uint32)0U << 26U) /* Framing error */
| (uint32)((uint32)0U << 25U) /* Overrun error */
| (uint32)((uint32)0U << 24U) /* Parity error */
| (uint32)((uint32)0U << 9U) /* Receive */
| (uint32)((uint32)0U << 1U) /* Wakeup */
| (uint32)((uint32)0U << 0U); /* Break detect */
/** - Finaly start SCI1 */
sciREG1->GCR1 |= 0x80U;
}
g_dmaCTRL g_dmaCTRLPKT_SCI1_TX; /* dma control packet configuration stack */
g_dmaCTRL g_dmaCTRLPKT_SCI1_RX; /* dma control packet configuration stack */ /* dma control packet configuration stack */
void SCI_DMA_init(void)
{
while (((sciREG1->FLR & SCI_TX_INT) == 0U) || ((sciREG1->FLR & 0x4) == 0x4))
{
}
dmaReqAssign(DMA_SCI1_TRANSMIT_channel, DMA_SCI1_TRANSMIT_REQUEST_LINE);
g_dmaCTRLPKT_SCI1_TX.SADD = (uint32)(SCI1_TX_DATA) ;
g_dmaCTRLPKT_SCI1_TX.DADD = ((uint32_t)(&(sciREG1->TD))+3);
g_dmaCTRLPKT_SCI1_TX.CHCTRL = 0;
g_dmaCTRLPKT_SCI1_TX.FRCNT = 4;
g_dmaCTRLPKT_SCI1_TX.ELCNT = 1;
g_dmaCTRLPKT_SCI1_TX.ELDOFFSET = 0;
g_dmaCTRLPKT_SCI1_TX.ELSOFFSET = 0;
g_dmaCTRLPKT_SCI1_TX.FRDOFFSET = 0;
g_dmaCTRLPKT_SCI1_TX.FRSOFFSET = 0;
g_dmaCTRLPKT_SCI1_TX.PORTASGN = PORTA_READ_PORTB_WRITE;
g_dmaCTRLPKT_SCI1_TX.RDSIZE = ACCESS_8_BIT;
g_dmaCTRLPKT_SCI1_TX.WRSIZE = ACCESS_8_BIT;
g_dmaCTRLPKT_SCI1_TX.TTYPE = FRAME_TRANSFER ;
g_dmaCTRLPKT_SCI1_TX.ADDMODERD = ADDR_INC1;
g_dmaCTRLPKT_SCI1_TX.ADDMODEWR = ADDR_FIXED;
g_dmaCTRLPKT_SCI1_TX.AUTOINIT = AUTOINIT_OFF;
dmaSetCtrlPacket(DMA_SCI1_TRANSMIT_channel,g_dmaCTRLPKT_SCI1_TX);
dmaSetChEnable(DMA_SCI1_TRANSMIT_channel, DMA_HW);
// dmaEnableInterrupt(DMA_SCI1_TRANSMIT_channel, BTC, DMA_INTA);
dmaReqAssign(DMA_SCI1_REVICE_channel, DMA_SCI1_REVICE_REQUEST_LINE);
g_dmaCTRLPKT_SCI1_RX.SADD =((uint32_t)(&(sciREG1->RD))+3) ;
g_dmaCTRLPKT_SCI1_RX.DADD =(uint32)(SCI1_RX_DATA) ;
g_dmaCTRLPKT_SCI1_RX.CHCTRL = 1;
g_dmaCTRLPKT_SCI1_RX.FRCNT = SCI1_RX_DATA_LEN;
g_dmaCTRLPKT_SCI1_RX.ELCNT = 1;
g_dmaCTRLPKT_SCI1_RX.ELDOFFSET = 0;
g_dmaCTRLPKT_SCI1_RX.ELSOFFSET = 0;
g_dmaCTRLPKT_SCI1_RX.FRDOFFSET = 0;
g_dmaCTRLPKT_SCI1_RX.FRSOFFSET = 0;
g_dmaCTRLPKT_SCI1_RX.PORTASGN = PORTB_READ_PORTA_WRITE;
g_dmaCTRLPKT_SCI1_RX.RDSIZE = ACCESS_8_BIT;
g_dmaCTRLPKT_SCI1_RX.WRSIZE = ACCESS_8_BIT;
g_dmaCTRLPKT_SCI1_RX.TTYPE = FRAME_TRANSFER ;
g_dmaCTRLPKT_SCI1_RX.ADDMODERD = ADDR_FIXED;
g_dmaCTRLPKT_SCI1_RX.ADDMODEWR = ADDR_INC1;
g_dmaCTRLPKT_SCI1_RX.AUTOINIT = AUTOINIT_ON;
dmaSetCtrlPacket(DMA_SCI1_REVICE_channel,g_dmaCTRLPKT_SCI1_RX);
dmaSetChEnable(DMA_SCI1_REVICE_channel, DMA_HW);
//dmaEnableInterrupt(DMA_SCI1_REVICE_channel, BTC, DMA_INTA);
sciREG1->SETINT |= SCI_SET_TX_DMA | SCI_SET_RX_DMA | SCI_SET_RX_DMA_ALL;
}
void SCI_Tx (uint8*buff,uint32 len)
{
uint8 i=0;
uint8 txdata=0;
if(DMA_SCI1_TX==true)
{
for(i=0;i<len;i++)
{
SCI1_TX_DATA[i]=buff[i];
}
while (((sciREG1->FLR & SCI_TX_INT) == 0U) || ((sciREG1->FLR & 0x4) == 0x4));
dmaSetChEnable(DMA_SCI1_TRANSMIT_channel, DMA_HW);
}
else
{
for(i=0;i<len;i++)
{
while ((sciREG1->FLR & (uint32)SCI_TX_INT) == 0U)
{
} /* Wait */
/*SAFETYMCUSW 45 D MR:21.1 <APPROVED> "Valid non NULL input parameters are only allowed in this driver" */
txdata = buff[i];
sciREG1->TD = (uint32)(txdata);
}
}
}
/** SCI.h **/
#ifndef COMMUNICATION_SCI_H_
#define COMMUNICATION_SCI_H_
#include "HL_hal_stdtypes.h"
#include "HL_sys_dma.h"
#define SCI1_RX_DATA_LEN 30
#define SCI1_TX_DATA_LEN 30
#define DMA_SCI1_REVICE_channel DMA_CH18
#define DMA_SCI1_TRANSMIT_channel DMA_CH19
#define DMA_SCI1_REVICE_REQUEST_LINE DMA_REQ28
#define DMA_SCI1_TRANSMIT_REQUEST_LINE DMA_REQ29
#define SCI_SET_TX_DMA (1<<16U)
#define SCI_SET_RX_DMA (1<<17U)
#define SCI_SET_RX_DMA_ALL (1<<18U)
void SCI_init(void);
void SCI_DMA_init(void);
void SCI_Tx( uint8*buff,uint32 len);
#endif /* COMMUNICATION_SCI_H_ */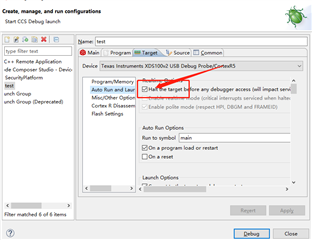
将此选项勾选后,程序中的变量值变为正常,
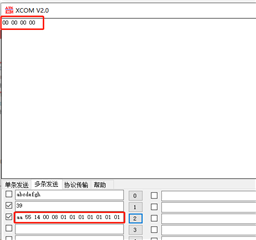
但SCI确无法发出有效数据和接收到数据。
将此选项勾选后,程序中的变量值变为正常
但SCI确无法发出有效数据和接收到数据。
C:\ti\Hercules\HALCoGen\v04.07.01\examples\TMS570LC43x下有相关的sci dma例程,您是否有参考?
另外E2E上有相关的分享贴,您也可以看一下
https://e2e.ti.com/support/archive/launchyourdesign/m/boosterpackcontest/666341
我的问题和他们不一样,关于DMA和SCI的程序代码是没问题的,我认为是CCS的配置导致的。但是是什么原因导致的就不知道了。
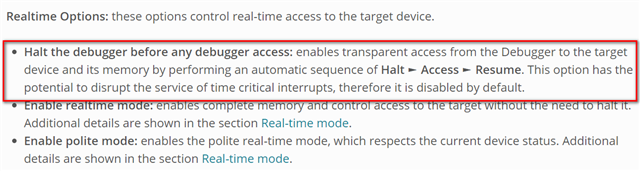
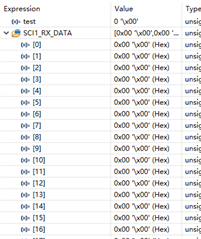
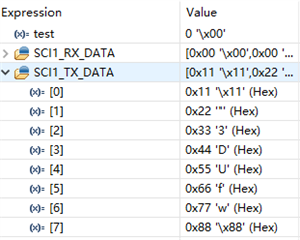
一、在 不勾选Halt the target before any debugger access 情况下,SCI的DMA发送和接收正确。如图:
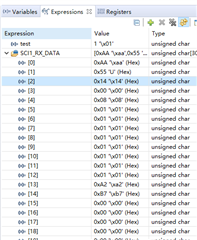
但是存在一下问题,当我将程序停在断点处时,数据发生了改变。同时程序不会运行到SCI_TX(sendbuff,8)处如图:
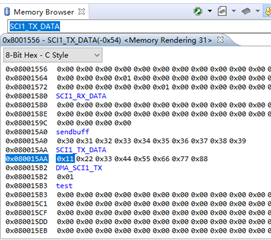
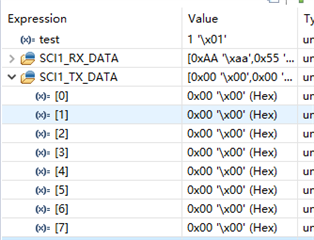
二、在 勾选Halt the target before any debugger access 情况下,SCI的DMA发送和接收异常确。如图:


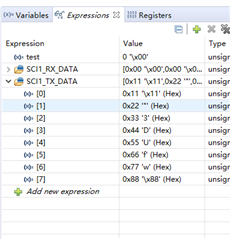
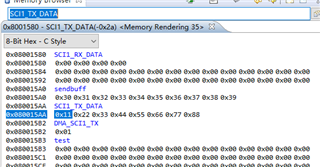
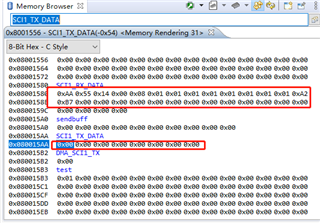
更改test变量后,程序可以运行到SCI_TX(sendbuff,8),但是SCI的DMA发送有问题,处如图:
请问您现在问题解决了吗?
Halt the target before any debugger access
在任何调试器访问之前暂停目标
在 勾选Halt the target before any debugger access 情况下,SCI的DMA发送和接收异常确
是不是有可能是暂停造成的时序不对?
