

Hi:
In the CAN communication of TMS570LS1114, I realized the communication between CAN1; but it has been unable to communicate between CAN2 and CAN3 (the configuration is same as CAN1); Do you know the reason? Is there any special attention to the communication between different CAN ports?My design scheme is shown in the picture.
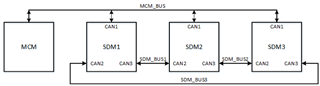
SDM1/2/3 are TMS570LS1114 chips, and each chip has the same procedure;
First, I used messageBox1 of CAN1 of SDM1 to send, and messagebox2 of CAN1 of SDM2 to receive, the same address communicates normally.
then,I used messageBox1 of CAN3 of SDM1 to send, and messagebox1 of CAN2 of SDM2 to receive, the same address failed to communicate.
Thanks for help.
