If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
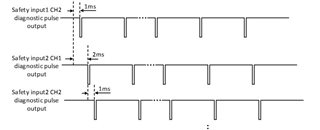
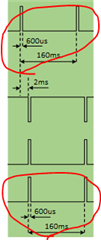
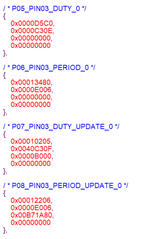
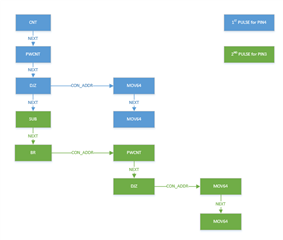
;PWM code for given HCLK frequency = 150MHz, VCLK2=75MHz, hr=1, and lr=32, so LRP=426.67ns ;Pulse Width = 600us, and period = 160ms ;The delay between two PWM signals is 2ms L00 CNT { reg=A,max=0x1FFFFFF,data=0};
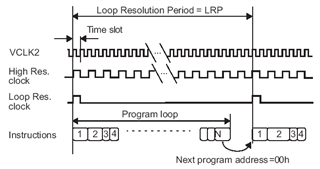
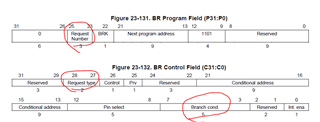
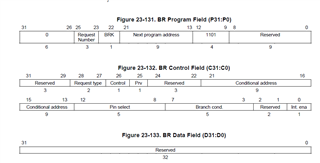
1.Next program address很好理解,就是下一条指令的RAM地址,那么Conditional address又该怎么理解,什么时候或者满足什么条件才会执行Conditional address指向的指令?如果执行了Conditional address上的指令,是不是指定的Next program address就不执行了?这个地方有点迷惑不解。
1.Next program address很好理解,就是下一条指令的RAM地址,那么Conditional address又该怎么理解,什么时候或者满足什么条件才会执行Conditional address指向的指令?如果执行了Conditional address上的指令,是不是指定的Next program address就不执行了?这个地方有点迷惑不解。
Next address是程序流中下一条指令的下一个程序地址。
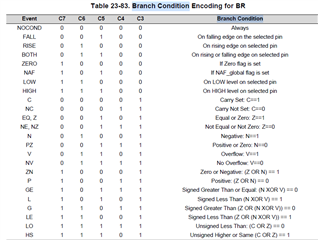
Conditional address是condition发生时下一条指令的地址。 condition可以是等于零“equal to zero" 、"Negative" 或"falling edge".。 这个是基于指令的。