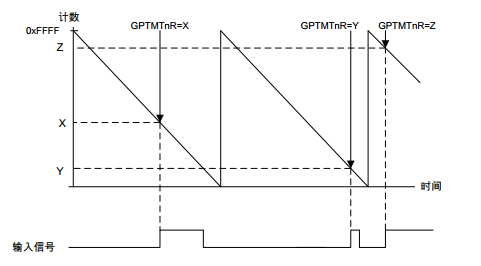
我将TIMER0配置为周期减计数模式, 在中断中读取当前计数值
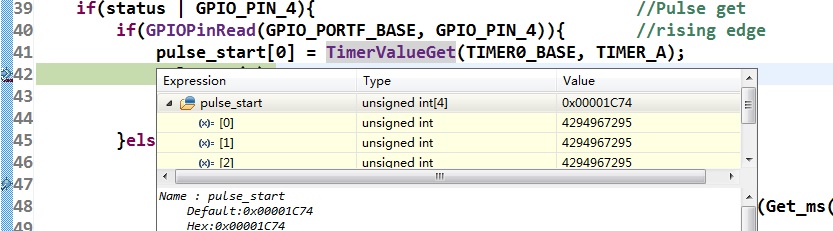
如图, 判断F4管脚上升沿之后, 读取TIMER0计数器的当前值, 发现读不到。
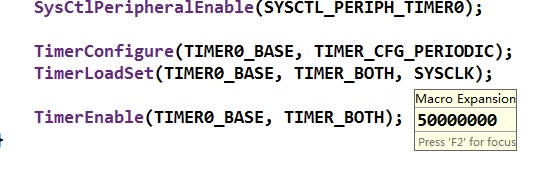
之前配置的TIMER0模式, LOAD值是50M, 所以上图中那个数肯定不对的。
事实上, 我在main函数的一个循环中不停打印TimerValueGet 函数得到的值,可以看到正确读出, 数值确实在周期减少。
使用芯片是tm4c123gh6pm, TIMER0是两个16位计时器拼起来的, 调用TimerValueGet 函数时, 第二个值给TIMER_A 这个宏即可(uer guide是这么说的, 我在main函数中也是这么用的)。
现在的问题是, 这个函数在主函数中可以正常传参数, 在中断中不行。