Part Number: TMS570LC4357
技术支持您好,
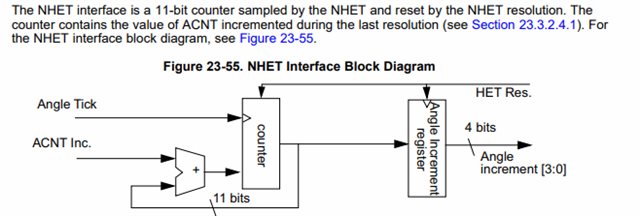
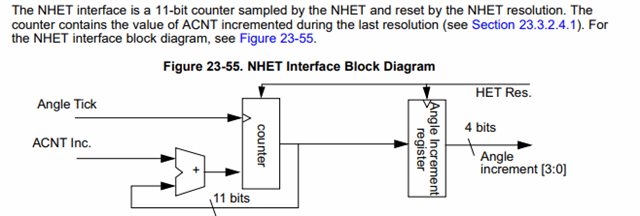
本人所用器件手册为spnu563a,在查阅文档时发现如下问题:
1、根据文档说明,angle increment = new angle cnt - old angle cnt,
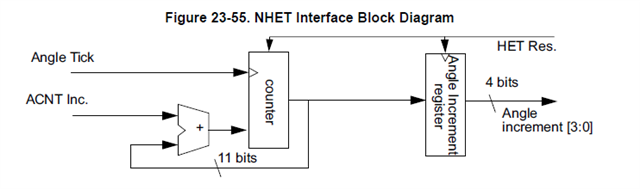
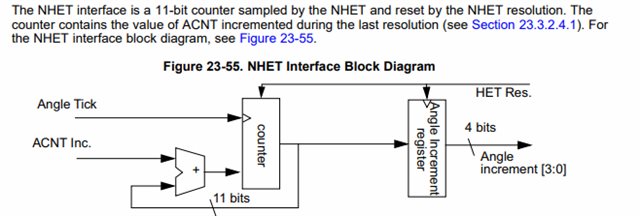
而HET Interface是一个11位的计数器,它会持续累加angle increment,请问该11位计数器的作用是什么,哪一个模块会使用到该计数器数值?同时,根据下图,为何4位angle increment 数据会来自该计数器?按照上文表述,angle increment的产生似乎有点矛盾。
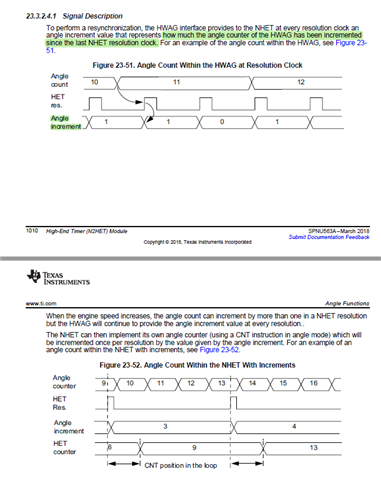
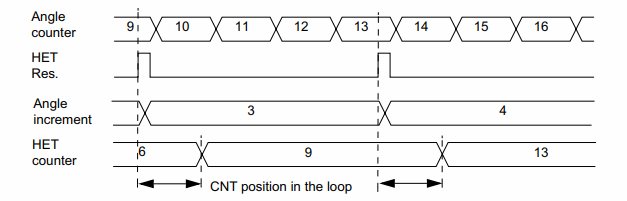
2、文档后续提到,当齿轮剧烈加速时,angle increment可能会超过15,此时angle increment最大值只能为15,HWAG会传给HET多个angle increment为15的数值以避免角度丢失。

此处是否可理解为,若当前angle increment=31,HWAG会分3次将angle increment传给HET,数值为15、15、1,如果是这样,那时序是怎样的呢?