

Part Number: TMS570LC4357
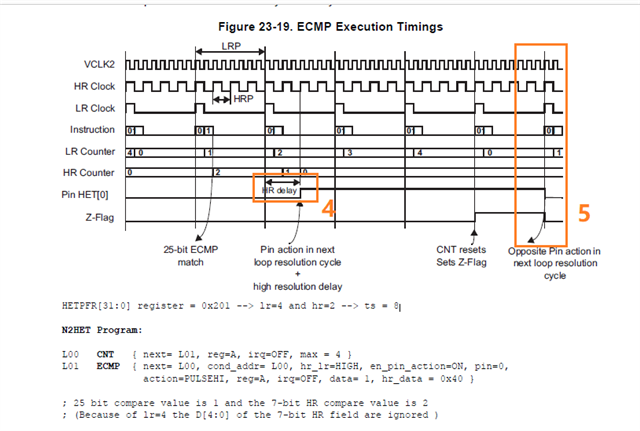
图1
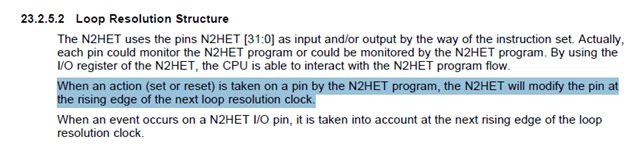
图2
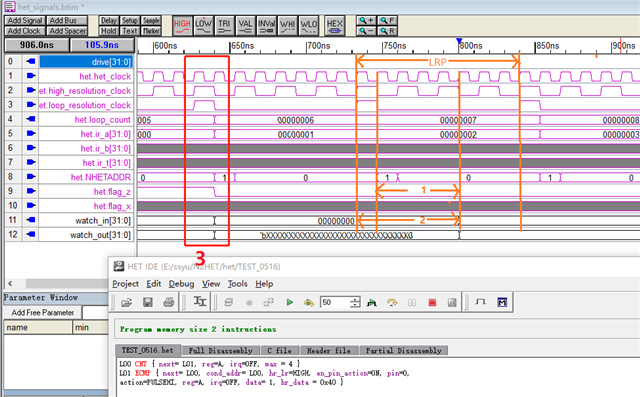
图3
问题1:关于引脚行为生效点问题。图1中位置5处,引脚动作在LRP上升沿执行,与图2中问题描述一致,但实际仿真结果显示在LRP下降沿执行,如图3中位置3处所示。实际运行应以哪一个为准?
问题2:关于HR delay时引脚行为的生效点问题。图1中位置4处,HR delay以LRP上升沿开始计算HR周期且在HR上升沿执行引脚行为。但在仿真中发现若以图3中位置2处所示方式以LRP上升沿开始计算HR周期则HR 延迟周期错误,仿真结果好像是HR delay以LRP下降沿开始计算HR周期且在HR下降沿执行引脚行为,如图3中位置1处所示,这与图1中的描述不符。实际运行应以哪一个为准?
