

Other Parts Discussed in Thread: MCT8316A
问题1. MCT8316ZT就有霍尔传感器接口,请问能够检测多快的霍尔型号呢?或者说MCT8316ZT能够控制多快的BLDC电机呢?
我要控制一块MAXON BLDC电机模组MAXON BLDC模组.pdf
其资料见附件 PDF文件
该组件由BLDC电机+减速器+光电编码器组成 减速比为57:1
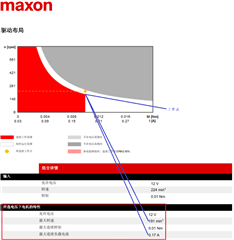
如上图所示,在图中标注的工作点,组件的最大连续工作转速为191RPM,因此电机的转速为191 x 57 = 10887RPM
电机为1对极电机,按照10887RPM转速计算,每秒会有( 10887 / 60 ) x 6 = 1088.7 约等于1089个霍尔状态,也就是说换相间隔(每个霍尔状态持续的时间)为1 / 1089 = 0.000918S = 918uS
按照MCT8316Z数据手册8.3.15章节描述

0时刻到t1时刻的时长为918uS,t1到t2的时长为918uS,也就是说FGOUT信号的周期是918uS x 2,其频率约为545Mz
霍尔信号的频率是FGOUT信号频率的3分之一,也就是545 / 3 约为182Hz
问题2.请问我的上述分析是否正确呢?
问题3. MCT8316ZT如何控制电机转速呢?
如数据手册描述,硬件接口的PWM信号频率可以到200KHz,这个频率应该是指三相桥的PWM开关频率吧?
是不通过调整硬件接口的PWM信号占空比,可以控制电机转速?
通过FGOUT信号可以计算出电机转速,软件上可以做一个PI控制器,利用给定和通过FGOUT计算得到的反馈转速动态调整硬件接口的PWM信号占空比,从而实现转速闭环控制?
这样看MCT8316ZT是不是仅可以做速度闭环控制,因为母线电流、相电流都没有引出来,芯片也仅可以通过ILIM做电流的限制性保护
