This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
您好,当前我使用寄存器读取速度,已经可以和转速计保持一致。但通过捕捉FG引脚的脉冲所计算的速度还不对,应该怎么使用这个引脚才能得到转速呢?
我的电机极对数是8,寄存器SysOpt9我配置的是2个电循环发1个脉冲,这里1个电循环是代表机械转一圈吗?
您好,我们已收到您的问题并升级到英文论坛寻求帮助,如有答复将尽快回复您。谢谢!
您好,
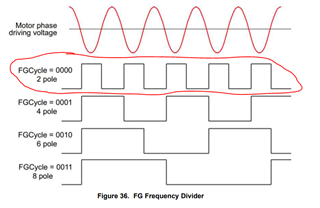
DRV10983中的速度寄存器以 Hz 为单位输出电机转速。 转速计读取以 RPM 为单位的机械速度。 如果两种速度都匹配(将机械 RPM 转换为 Hz 后),那么电机应该有1极对。 如果 SysOpt9中的 FGcycle 设置为"2个电周期以发送1个脉冲",那么 FG 将在2个电循环中输出1个脉冲,如下图所示。 对于一个8极电机来说,4个电循环等于一个机械周期。
谢谢,转速读取的问题解决了,目前可以通过FG引脚获得比较准确的转速,但又出现了新的问题。
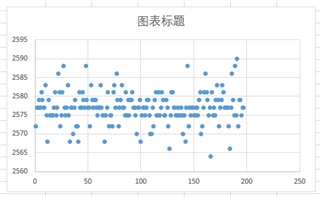
在空载,高转速的时候出现了转速波动,我使用单片机向DRV10983输入一组固定占空比的PWM信号,得到的速度如下图,纵坐标的单位是RPM,可以看出速度波动量最大为25RPM
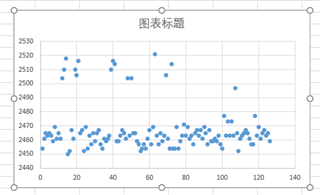
另外还发现了比较奇怪的现象,在一个位置出现了下图的速度波动,波动量达到了70,我应该从什么角度去思考这个问题?EEPROM中的哪些参数可能会导致类似现象?
好的我们来跟进给工程师看下。最近由于国外假期,回复将会有所延迟(直至1月4日),感谢您的耐心等待!
当估算的 BEMF 常数不稳定时,速度会有所波动。 您可以进行以下尝试:
1.将控制系数配置为小于1的值。
2.调试lead time,直到估算的 BEMF 常数稳定。
请问目前是通过 FG 还是速度寄存器来读取速度?
您好。
您所说的BEMF的值是否指寄存器中的MotorParam2的设定值?
如果将控制系数调整成0.5,此时给满占空比,速度无法提升到指定速度,之前一直设定为1;
关于lead time,我不太理解这个是什么意思;
我通过尝试改变MotorParam2的值,发现该值设定的大,电机的最大转速就变高;该值设定的较小,电机的最大转速就变小。该寄存器的值都调整在一个较小的范围
当前是通过获取FG的脉冲来计算转速的。通过外部的转速表,也可以发现电机在高转速下,速度确实在上下波动。
请问还能如何调整呢?我给的PWM频率是10KHz,使用的电机参数如下:
额定电压24V,三相,空载转速3850,电流0.12,带载转速2800,电流1.5,端子间电阻3.8欧姆,电感2.8mH,手册还给了反电势常数,6.24mV/rpm,这个值很奇怪,与估算差距较大
关于KT(PHASE-PHASE)的计算:估算1:3850 / (60 / 8) = 513.324 / 513.3 = 46.7mv/hz
估算2:2800 / ( 60 / 8 ) = 373.3
(24V - 1.5A * 1.9Ω * 1.73) / 373.3 = 51.1mv/hz
以上述两个估算值为基础设定,电机都能正常工作,但就是高速时速度波动
还有一个比较重要的信息,例如当前2500转时速度波动较大,速度升到2700,波动就明显变小了,换了好几个电机和芯片,都是这个现象
我们跟进给工程师看下哈,应该要在假期后给到您答复。
LZJ 说:您所说的BEMF的值是否指寄存器中的MotorParam2的设定值?
估算的 BEMF 常数是从 MotorKt1 (address:0x15)和 MotorKt2 (address:0x16)寄存器读回的值。
LZJ 说:关于lead time,我不太理解这个是什么意思;
以下是有关如何调整lead time/angle的应用手册:https://www.ti.com/lit/an/slaa561/slaa561.pdf
关于BEMF常数测量的问题,请参考section 8.4.1.2 DRV10987 datasheet.