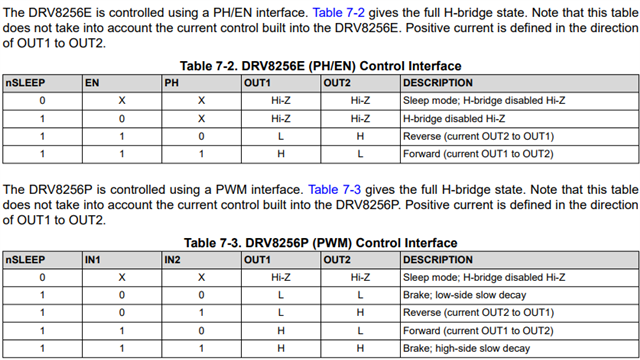
使用的驱动芯片是DRV8256P,驱动一个24V直流电机,电机的最大电流是2A,芯片的IN1采用PWM信号,50kHz,IN2常为低电平,Itrip设置为2.5A,Toff设计为24us,slow decay 模式,当PWM信号的占空比在30%~90%之间时,电机发热比较严重,温升有50摄氏度,而当占空比为20%以内或者100%时,电机的温度就正常,跟直接加直流电压驱动电机一样。
请问:1、PWM信号占空比在30%~90%之间的电机温升是否正常?
2、引起的原因是什么?
3、有没有办法降温?
谢谢!