

智能车是一个比较复杂的系统,包括MCU电源管理,舵机控制以及电机驱动。在设计中该如何管理各个稳压模块以及驱动部分。
智能车由7.2V可充电电池供电,目前使用TPS750为板上逻辑器件以及编码器供电,同时tps7350输出端接TPS7333为传感器供电,在另外取tps7333直接电池稳压给MCU以及板上其他外设供电,还有一芯片为舵机提供电源。
采用主板与驱动板分离的方案,两者通过粗铜线连接。
目前比较疑惑的是电源地,数字地跟模拟地的隔离。
使用TPS7350为数字外设供电,但tps是接电源的,因此tps到底接电源地呢,还是数字地呢?同时我又用tps7350串联tps7333为模拟传感器供电,那么该tps7333的地是否应该直接连接模拟地?还是均为电源地,然后不同的地之间通过磁珠连接?
智能车系统中,还有舵机的存在,舵机是一个大电流器件,那么舵机稳压芯片的地是否应该是电源地?但舵机的控制信号是又mcu经一与门提供的,该与门的地是否选择电源地还是数字?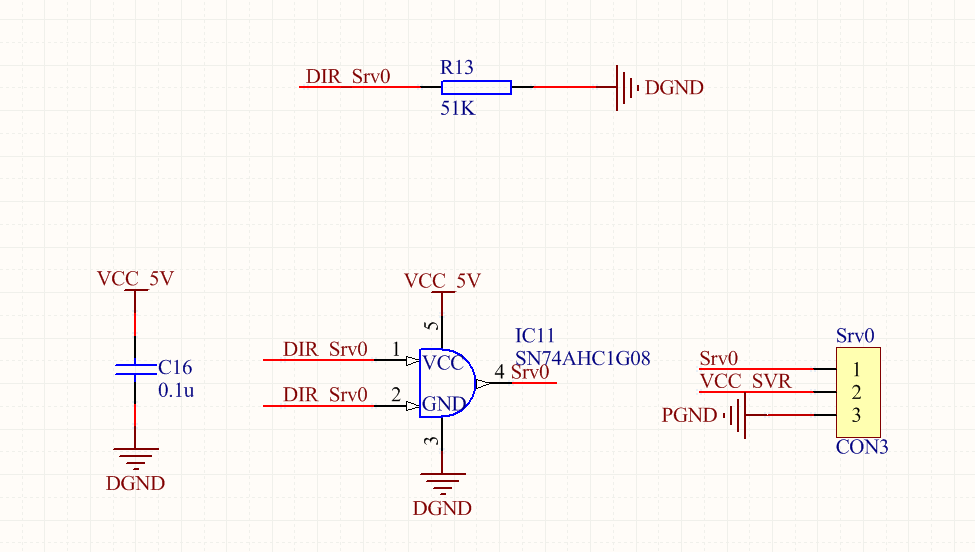
同样在驱动板上也存在这样的问题,mos的地毫无疑问的是PGND的,那么mos驱动器件ir2104s的地是接PGND还是DGND呢?ir2104的驱动信号也是由逻辑器件控制的,逻辑器件的输入由主板经ffc提供,那么逻辑器件的地应该是什么地?是否有必要通过ffc从主板引入DGND?在驱动板的5V稳压以及5-12V为ir2104的地应该如何选择?
望指点迷津,虽然主板上的各种地不区分应该也能正常工作,但希望有更为深入的了解
