问题:
在我的工程中主要是配置了PWM中断以及按键sw5的中断,PWM频率设置为200kHz,PWM中断触发设置成一次事件触发,(应该是每秒触发200k次中断吧),如下图所示。

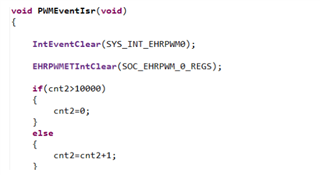
PWM中断函数设置成一个计数的例子,如下图所示
主函数同样设置成一个计数的循环,如下图所示:
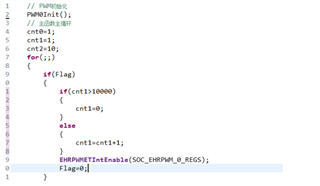
PWM0Init()函数是对PWM模块的一些配置,并使能了中断。设置200kHz的PWM频率运行程序后发现主函数PWM0Init()语句后面的所有语句都没有执行,设置断点调试后发现程序一直在执行PWM的中断函数,也就是说cnt2一直在计数,而cnt1没有计数。
DSPC6748主频456MHz,EPWM模块的时钟是228MHz,对于200kHz的中断,应该还有充足的时间去执行其他指令,将中断频率减小到20kHz,程序就能正常运行主函数其他指令,难道是PWM中断频率过高了吗?但是以前用的DSPF28335,主频150MHz,我最高将PWM中断设成1MHz,程序运行也没有这个问题。会不会是对哪些时钟模块的配置没有设置最高?或者与GEL文件的配置相关?
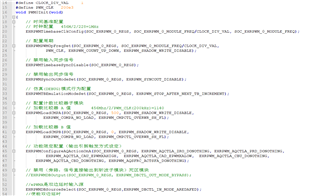
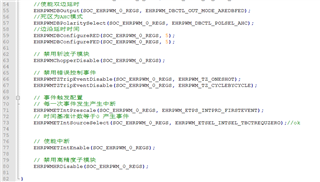
附PWM初始化代码: