

Part Number: IWR1843BOOST
Other Parts Discussed in Thread: DCA1000EVM,
使用IWR1843BOOST和DCA1000EVM对某些目标进行检测:第一个目标是墙,通过移动雷达,从而改变雷达到墙的距离,采集到信号后进行处理,在峰值处显示的距离总比实际距离大5cm;第二个目标是木板,在峰值处的距离总比实际距离大6-7cm.
处理过程中利用TI官方的示例代码解析二进制文件,再将数据重塑为4D矩阵[天线数, 采样点数, 每帧chirp数, 总帧数],然后进行如下代码的处理
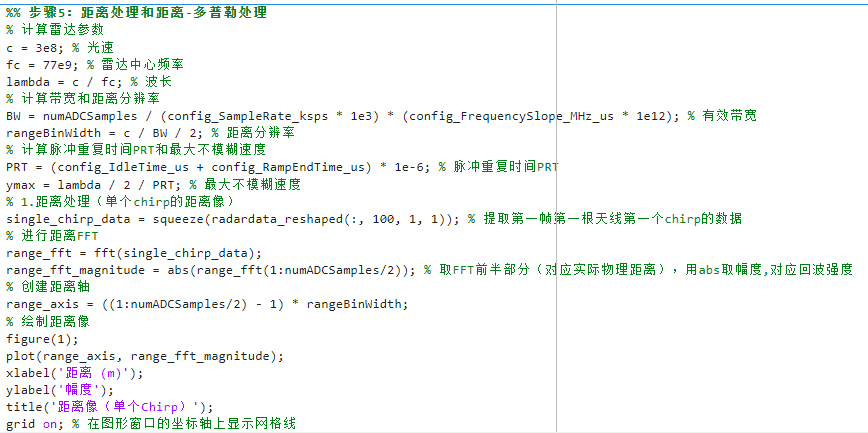
请问是什么原因导致的这个问题啊?是代码错误,还是硬件原因啊?
