If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
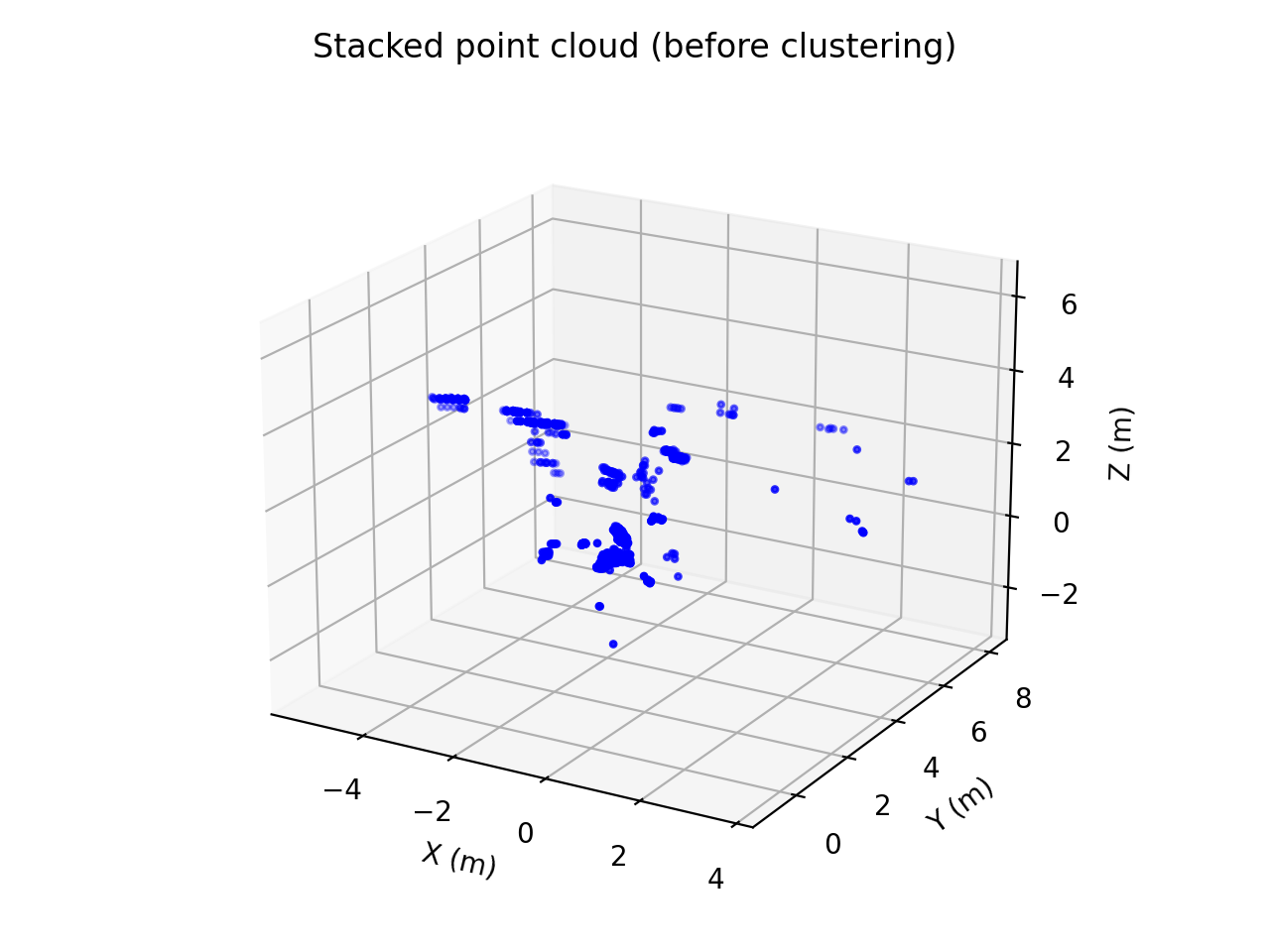
IWR6843AOPEVM: 、使用3d people tracking来采集动作数据时,在代码中添加了静态点,但采集后发现噪声点很多,且动作不清晰,如何使得采集的数据人体簇动作更加清晰?