

利用网页配置天线参数为4R3T,然后在2维平面上画出很多帧累积的检测点,结果如图。
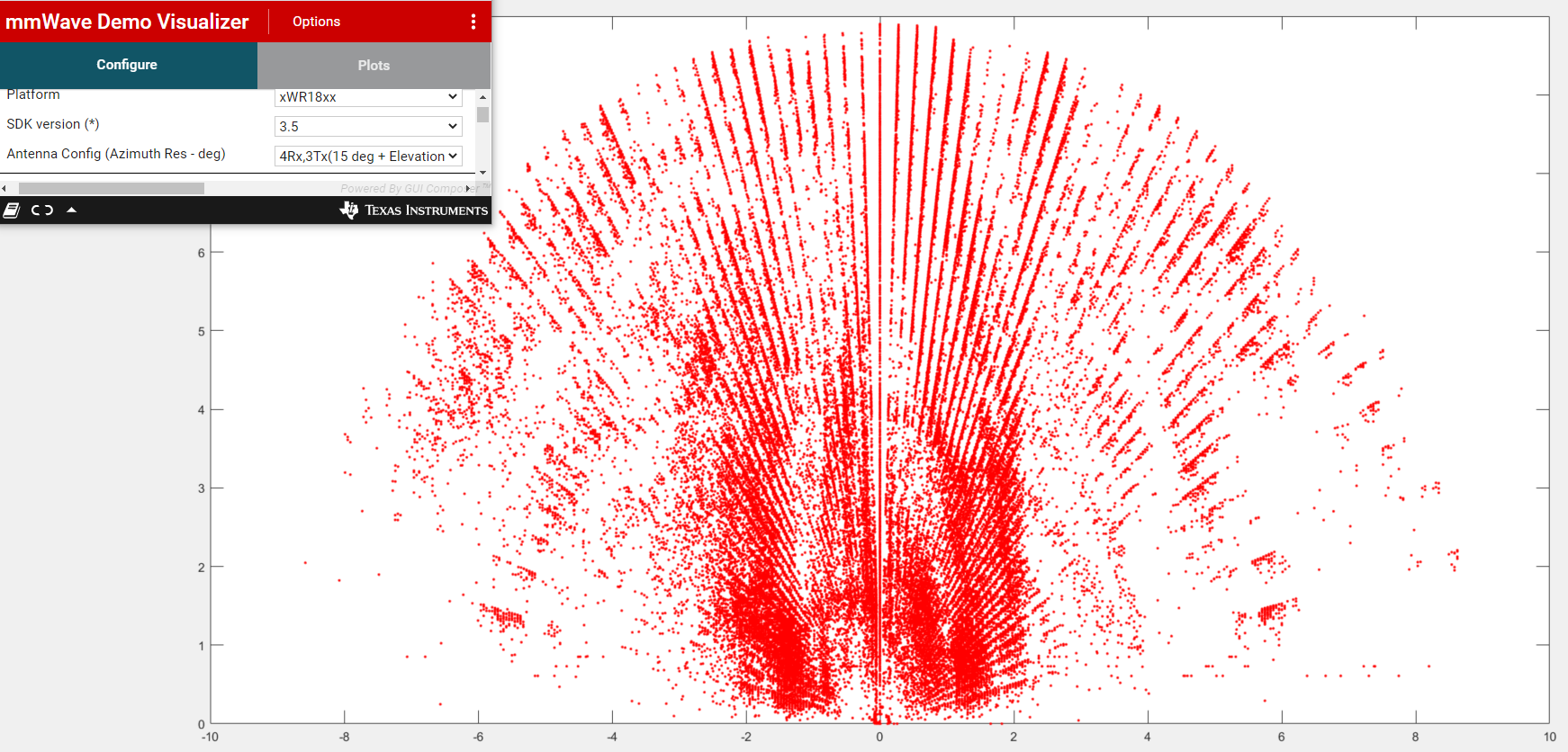
这个数据可以认为没有目标动,我拿着板子一直晃,然后把所有帧里的点画到xy平面上的结果,感觉水平方位很有规律,有很多射线,两条射线间大概是1.8度,不明白为什么,问题如下:
1.请问大佬为什么雷达检测的点是一条条射线状的,且两条射线间的角度差大概在1.8度?
2.网页上显示的角度分辨率(azimuth res-deg)(15deg+elevation)是啥意思,跟这个结果有啥关系?
我现在大概猜测 4r3t天线中,水平方向2t发挥作用,相当于虚拟了8个接受天线,然后角度分辨率按公式等于2/N弧度,N为天线个数,则大概是14.25度,所以网页标的15度?(上图左上角天线配置azimuth res后面显示15deg+elevation),然后再除以8大概在1.78度,跟两射线间的角度相似.。。不知道有没有道理,感觉就是瞎猜啊。。。
高度方向的zy平面图如下,横坐标为z,纵坐标为y
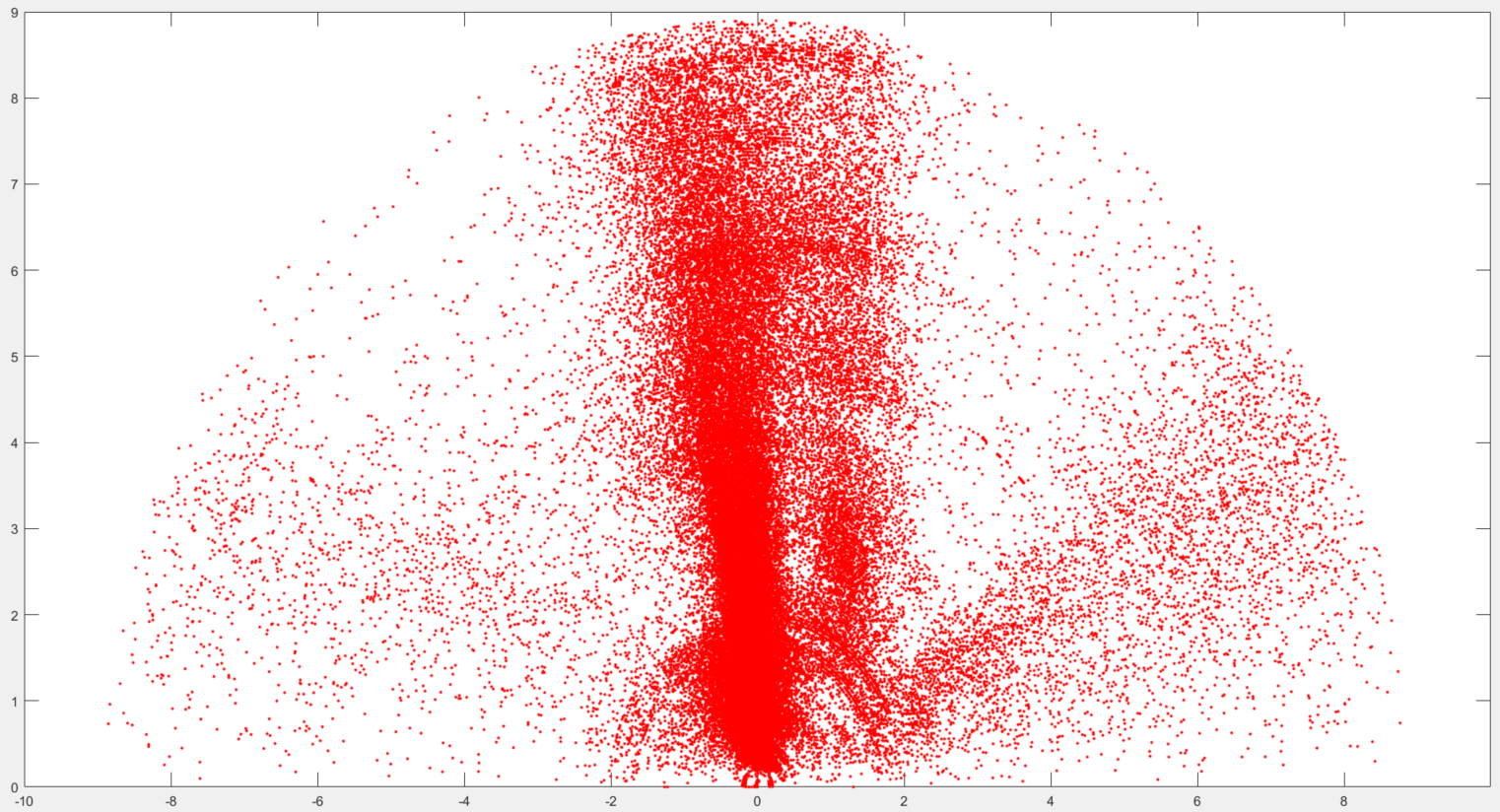
好像高度方向的角度分辨率没什么规律?
