

您好:
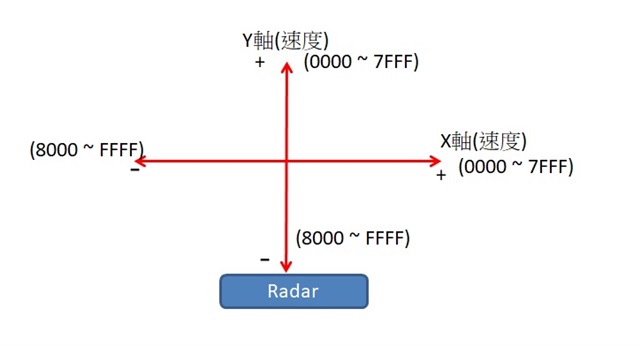
想請教SRR dss_data_path.c內 trackerOpFinal[tk].yd 看起來是表示Y維度的速度向量,想確認針對X維度及Y維度向量的表示範圍是否如下所示
我嘗試修改下面這段代碼來取得正在逼近雷達的物體,但看起來好像沒效果,是否有哪裡設定錯誤?
if( 0xebff < (int16_t) (obj->trackerState[ik].vec[iYd]*oneQFormat) < 0xff7f) //限制感測速度在3km~150km/h之間(-42 ~ -1)
{
trackerOpFinal[tk].x = (int16_t) (obj->trackerState[ik].vec[iX]*oneQFormat);
trackerOpFinal[tk].y = (int16_t) (obj->trackerState[ik].vec[iY]*oneQFormat);
trackerOpFinal[tk].xd = (int16_t) (obj->trackerState[ik].vec[iXd]*oneQFormat);
trackerOpFinal[tk].yd = (int16_t) (obj->trackerState[ik].vec[iYd]*oneQFormat);
trackerOpFinal[tk].xSize = obj->trackerState[ik].xSize;
trackerOpFinal[tk].ySize = obj->trackerState[ik].ySize;
tk++;
}

