

TI的工作人员您好:
关于4芯片级联开发板里面自带的mimo_example matlab程序中到达角估计部分存在一些疑惑:
TI的程序中,采用方向角和俯仰角两维FFT得到,并依据得到的角度计算(X,Y,Z)坐标。
而实际中目根据理论模型,所得目标反射到雷达上的与方向天线阵列和俯仰天线阵列的夹角如下图所示
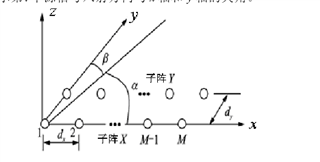
这就意味着FFT求出的两个角度只是目标相对于方向天线和俯仰天线的夹角 ,并非目标的方向角,实际上还需要进行转换,如下图:

关于这点,TI程序里面对于FFT求出的角度直接进行了应用,而非进行转换。matlab程序与理论存在了角度转换的区别
为什么两次FFT求出的与X轴和y轴的夹角,可以直接当成目标的俯仰角和方向角,而不需要角度转换?
希望能解答,谢谢
