

Hi,
我看AWR1843的资料是可以进行chirp的相位改变的,目前我这基于AWR1843平台的雷达工作在MMWave_ExecutionMode_COOPERATIVE模式,需要实现chirp的相位改变:
目前我这已经做的工作及现状如下:
1. 基于'mmwave_automotive_toolbox_3_5_0'中的 'lab0011_mrr_beamsteering' 的工程,仿真调试(下图中1、2波形均有测试),可以看到电流在跳变,一直测量不到目标(采集1d\2d数据作图,均没有目标,我模拟器一直有一个固定的40m目标的),why?

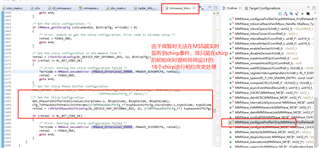
但是在dss中的断点(如下图处断点)运行,不响应,接CAN监测数据,PC上无数据,,why?
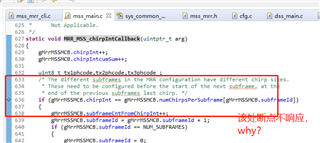
mss处,断点监测,MRR_MSS_chirpIntCallback不响应断点(如下图),但是MRR_MSS_frameStartIntCallback可以响应断点,,,why???
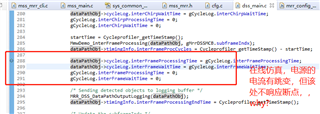
2. 基于我之前测速雷达的工程运行,原工程(工作在MMWave_ExecutionMode_COOPERATIVE模式)可以测量到目标,将上述1.中的chirp相位改变相关代码移植到该工程中,,如下图:


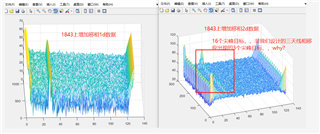
该工程运行后,采集1d、2d数据作图,,结果如下,但不是我们设计的3个尖峰目标,而是16个尖峰目标,,why??
综上,,我们的需求问题如下:
(1)若在上述1.中的 'lab0011_mrr_beamsteering' 的工程中实现我们的chirp相位改变的,,怎么能测量到我们给定的目标?MRR_MSS_chirpIntCallback中怎么能响应运行?
(2)若在上述2.工程基础上实现chirp相位改变,怎么修改chirp的相位,使得出现3个尖峰(针对我的固定目标)目标?

