

在使用mmwave_studio_cascade user guide的mimo和tbf两种模式成像时,效果很不理想,感觉分辨率很差,如下
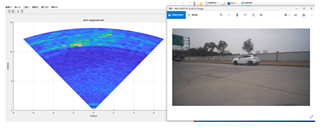
请问在哪里设置参数可以提高分辨率吗,guide里面的mimo和tbf的配置,是高分辨率的配置吗,使性能达到最佳的参数设置是怎样的呢?
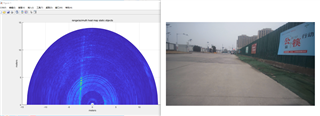
在使用mmwave_studio_cascade user guide的mimo和tbf两种模式成像时,效果很不理想,感觉分辨率很差,如下
请问在哪里设置参数可以提高分辨率吗,guide里面的mimo和tbf的配置,是高分辨率的配置吗,使性能达到最佳的参数设置是怎样的呢?

