

Other Parts Discussed in Thread: AWR1642,
你好,我正在使用AWR1642+DCA1000在Ubuntu系统上采集数据
根据sdk_user_guide文档,我在启动AWR1642之后,依次利用DCA1000EVM_CLI_Control发送配置并进行数据采集
其中使用的json文件内容如下:
{
"DCA1000Config": {
"dataLoggingMode": "raw",
"dataTransferMode": "LVDSCapture",
"dataCaptureMode": "ethernetStream",
"lvdsMode": 2,
"dataFormatMode": 3,
"packetDelay_us": 25,
"ethernetConfig": {
"DCA1000IPAddress": "192.168.33.180",
"DCA1000ConfigPort": 4096,
"DCA1000DataPort": 4098
},
"ethernetConfigUpdate": {
"systemIPAddress": "192.168.33.30",
"DCA1000IPAddress": "192.168.33.180",
"DCA1000MACAddress": "12.34.56.78.90.12",
"DCA1000ConfigPort": 4096,
"DCA1000DataPort": 4098
},
"captureConfig": {
"fileBasePath": "/home/hcm/Desktop",
"filePrefix": "outdoor_capture",
"maxRecFileSize_MB": 1,
"sequenceNumberEnable": 1,
"captureStopMode": "infinite",
"bytesToCapture": 50000,
"durationToCapture_ms": 5000,
"framesToCapture":10
},
"dataFormatConfig": {
"MSBToggle": 0,
"reorderEnable": 1,
"laneFmtMap": 0,
"dataPortConfig": [
{
"portIdx": 0,
"dataType": "real"
},
{
"portIdx": 1,
"dataType": "complex"
},
{
"portIdx": 2,
"dataType": "real"
},
{
"portIdx": 3,
"dataType": "real"
},
{
"portIdx": 4,
"dataType": "complex"
}
]
}
}
}
采集过程如下: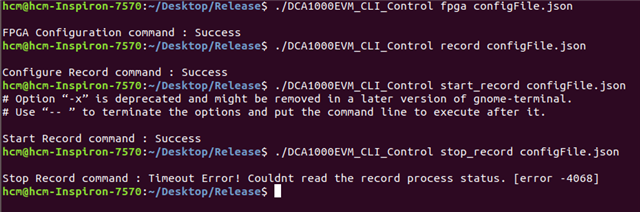
1、这里遇到了第一个问题,start_record成功,出现了outdoor_capture_Raw_0.bin文件,而stop_record时发生了报错,但同时一下子出现了outdoor_capture_Raw_1.bin~outdoor_capture_Raw_40.bin(因为我把maxRecFileSize_MB设置为1,每个.bin文件都很小)
看起来终止命令没有成功,但是数据依然保存了下来。我个人怀疑是json文件内参数的问题,但是没有在这个文档里找到各个参数的详细解析,请问在哪里有呢?比如captureStopMode这一项,显然有多个参数可选
2、现在我暂且认为采集的数据是正确的,我试着用它生成range-doppler、range-azimuth热图
此前,我已经成功解析了使用mmwave studio录制的数据,生成了正确的热图,但解析现在采集的数据时发生了错误。在我的理解中,每一帧数据有numTxAntennas * numRxAntennas * numLoopsPerFrame * numADCSamples个采样,每个采样是一个实部+一个虚部。但这和json里却有这样的配置:
"dataPortConfig": [
{
"portIdx": 0,
"dataType": "real"
},
{
"portIdx": 1,
"dataType": "complex"
},
{
"portIdx": 2,
"dataType": "real"
},
{
"portIdx": 3,
"dataType": "real"
},
{
"portIdx": 4,
"dataType": "complex"
}
]
这似乎无法对应上,不知道是不是它导致的错误
希望您能解答我的两个问题,谢谢!

