Other Parts Discussed in Thread: AWR2243, AM2732
您好,
按照mmwave_mcuplus_sdk_user_guide.pdf 4.8.3中Building Demo的方法以及
%MMWAVE_SDK_INSTALL_PATH%/ti/demo/%MMWAVE_SDK_DEVICE%/mmw路径下makefile里面的配置说明,当前Build 'mssDemo'是一起的、Build 'dssDemo'及Build 'bin'各个模式都是一起的(比如am273x_mmw_demoDDM.appimage和am273x_mmw_demoTDM.appimage),如果想单独编译其中某一个image文件(比如am273x_mmw_demoTDM.appimage)或者mssDemo(比如am273x_mmw_demo_mssTDM.xer5f等)需要如何去做配置呢,相关的配置文件需要做怎样的修改实现呢?
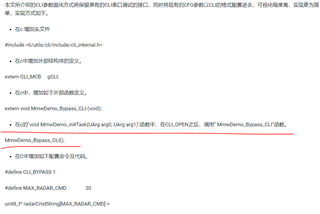
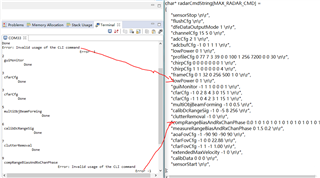
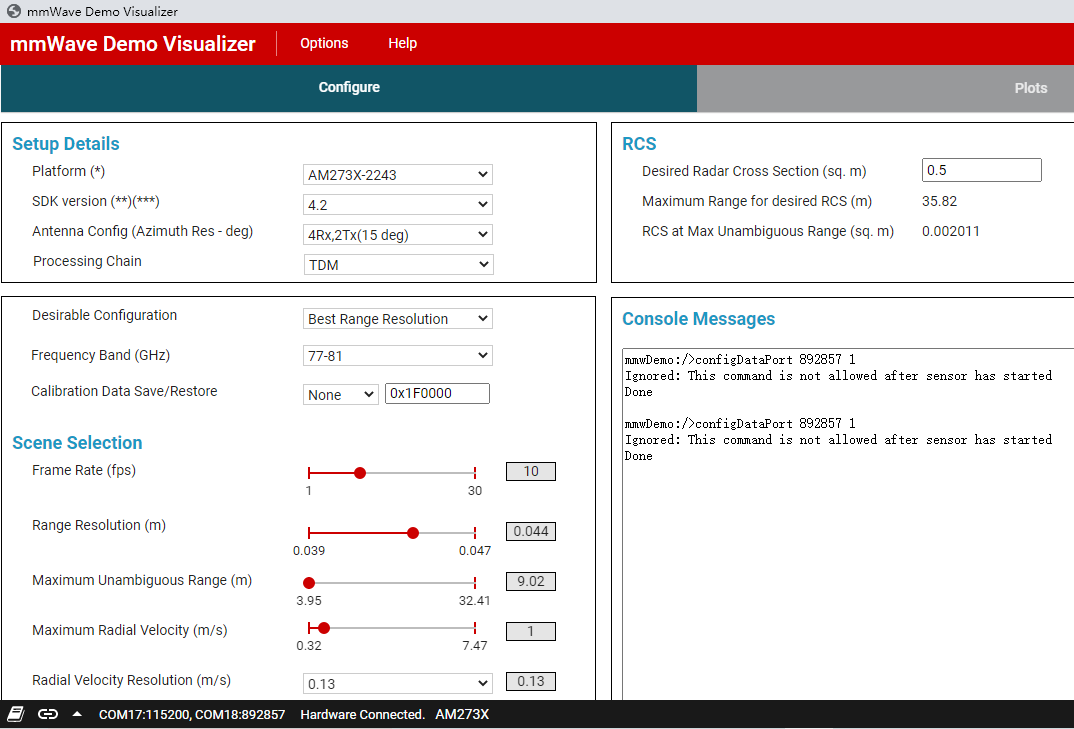
此外,当前编译的image文件刷录之后需要重新单独通过mmWave_Demo_Visualizer Load profiles参数配置文件,对于用户的产品来说可不可以直接编译完整的image文件(包括参数配置)刷录之后雷达就可以直接运行了?如果可以的话,该如何去实现呢?
谢谢。