This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
你好,
29度是通过天线数计算的角度分辨率,如果两个目标具有同样的距离和速度,那要在角度上隔开29度才能区分。但是两个目标在速度,距离,角度三个维度只要有一个不同,就是可以区分的。
另通过软件算法是也可以增加角度分辨率的。
1."速度,距离,角度三个维度只要有一个不同,就是可以区分的"这句话是通过三维FFT去实现的吧?
2.“通过软件算法是也可以增加角度分辨率”的“软件算法”指3维FFT?
yang lin 说:1."速度,距离,角度三个维度只要有一个不同,就是可以区分的"这句话是通过三维FFT去实现的吧?
速度,距离或者角度任何一个维度有不同,就可以通过CFAR把目标检测出来。
yang lin 说:2.“通过软件算法是也可以增加角度分辨率”的“软件算法”指3维FFT?
请搜索一下超分辨算法。
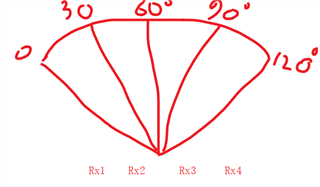
29度怎么算出来的呢?是通过FOV=120°,然后4根接收天线,那么就是120/4=30 ?
那具体怎么分辨呢?是根据4根接收天线哪根接收到的信号强,就说明那一根接收天线对应的区域有物体?比如第一根接收天线Rx1接收到的信号强,就说明第一个区域(0-30°)有物体?第二根接收天线Rx2接收到的信号强,就说明第二个区域(30-60°)有物体?
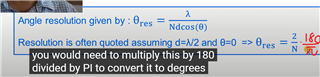
请参考下面的培训视频,注意公司计算出来是弧度,要换算为度数
Intro to mmWave Sensing : FMCW Radars - Module 5 : Angle Estimation | TI.com Video
你是想说(2/N)×180/pi这个式子吗?N是多少呢?N=4?可是如果N=4我算出角分辨率是28.66°.。。。。所以是28.66约等于29°对吧?
不过这个分辨率是傅里叶变换后的频域里的分辨率,刚好有天线数量出现,但不是由天线引起的物理分辨率。。。虽然说(2/N)×180/pi这个式子中的N是接收天线的数量。(我这么理解对吗?)
天线物理分辨率和FFT的分辨率不一样。天线的物理分辨率是120°/4=30°
yang lin 说:FFT的分辨率不一样
角度维度的fft点数,影响的是角度的精度(不是分辨率)
关于角分辨率,请参考下面文档的2.3.2,N接收天线数是虚拟接收天线数。
https://www.ti.com/lit/an/swra553a/swra553a.pdf
下面的信息可以在60GHz mmWave Sensor EVMs user‘s guide里找到。
那角度的分辨率29°怎么来的呢?
就是你之前计算的那样,虚拟接收天线为4(无论是水平还是垂直)。
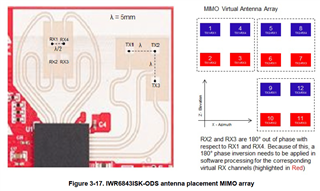
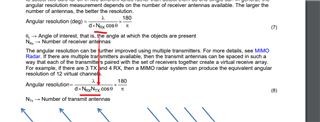
可是你给的pdf里面说,如果是三发四收,那么会得到12根虚拟天线(我现在的IWR6843确实是三发四收),然后这个虚拟天线=12是可以代入到下图我画红色的公式。请问我怎么知道什么时候该代入虚拟天线,什么时候该代入实际的4根接收天线?
请问你是否有仔细看过我上面的回复。我贴出了IWR6843ISK-ODS板子的虚拟天线阵列。和IWR6843ISK是不同的。
yang lin 说:请问我怎么知道什么时候该代入虚拟天线,什么时候该代入实际的4根接收天线?
请问你的配置是否为MIMO,请参考下面的文档。建议多看看毫米波相关的信息。
MIMO Radar (Rev. A)
我的是IWR6843ISK-ODS。我问一下,就是开启MIMO模式才会用虚拟天线(12根)对吧?如果不开启MIMO模式,就是4根?
(我也不知道MIMO模式还要手动调整cfg文件开启,我以为自动开启)
虚拟天线排布是和天线设计相关的,请再仔细看看相关文档。





 请问我怎么知道什么时候该代入虚拟天线,什么时候该代入实际的4根接收天线?
请问我怎么知道什么时候该代入虚拟天线,什么时候该代入实际的4根接收天线?