

TI工程师 您好,
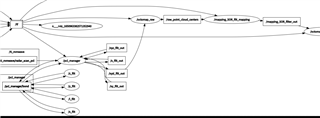
这是/ti/mmwave_industrial_toolbox_4_10_1/labs/Robotics/autonomous_robotics_ros 这个实验里面的radar_mapping 的计算图,我的问题是
1、我想知道这个建图的代码在哪个文件夹下?
2、我看了官方提供的guide中说明,里面说道,ros先对原始的点云数据进行滤波,然后使用otomap_sever得到raw_map, 后面采用SOR对地图优化,我找了很久都没有找到这部分代码,只有launch文件可以使用。

