您好,
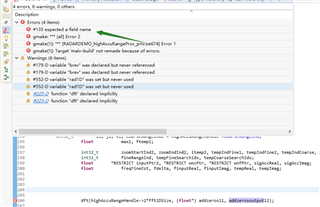
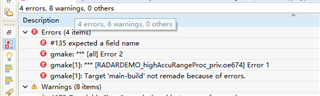
我使用的demo是D:\zj\AutomotiveToolbox\AutomotiveToolbox4.11\new\mmwave_industrial_toolbox_4_11_0\labs\Level_Sensing\src\16xx,该例程使用的zoomfft实现了高精度测距,我想自己编写一个补0的算法与其比较,但是我在开辟空间的时候遇到了一些问题。我需要将FFT的点数拓展到4500个点左右才能满足测距精度,我在high_accuracy_16xx_dss/RADARDEMO_highAccuRangeProc.c添加了分配空间的代码,但是其提示我说L2内存溢出
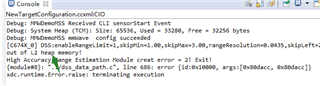
我自己想的解决办法是使用:#pragma DATA_SECTION,但是我不知道应该把此空间开辟在哪里,因为我不能确定哪一块空间是可用的,也无法确定应该把这个变量放在L3或者L2。希望您能帮我解决一下我提出的这两个问题。

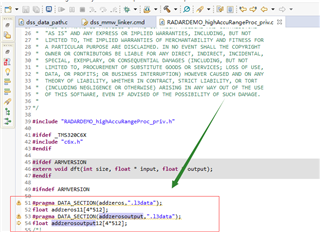

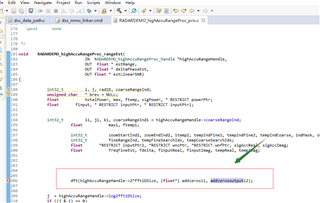
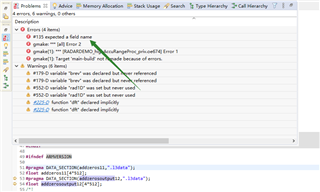 我已做出修改。
我已做出修改。