Other Parts Discussed in Thread: MMWAVEICBOOST, UNIFLASH
您好:
我在只有一块IWR6843ISK-ODS开发板的情况下,参考了《使用低速串行总线的实时 ADC 原始数据采集方法》并按照其中的方法对源文件进行了修改,如下:
1、按照参考方案修改了mss_main,c中的代码,因没有MMWAVEICBOOST 开发板,故将波特率调小如下

在rebuild 之后通过uniflash 刷写如开发板
2、按照参考方案修改了oob_parser.py 中的代码
3、修改了cfg文件,如下
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 15 5 0
adcCfg 2 1
adcbufCfg -1 0 1 1 1
profileCfg 0 60 567 7 57.14 0 0 70 1 128 2800 0 0 30
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 0 0 0 0 0 4
frameCfg 0 1 4 0 1300 1 0
lowPower 0 0
guiMonitor -1 1 0 0 0 0 0
cfarCfg -1 0 2 8 4 3 0 15 1
cfarCfg -1 1 0 4 2 3 1 15 1
multiObjBeamForming -1 1 0.5
clutterRemoval -1 0
calibDcRangeSig -1 0 -5 8 256
extendedMaxVelocity -1 0
bpmCfg -1 0 0 1
lvdsStreamCfg -1 0 0 0
compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
measureRangeBiasAndRxChanPhase 0 1.5 0.2
CQRxSatMonitor 0 3 5 121 0
CQSigImgMonitor 0 127 4
analogMonitor 0 0
aoaFovCfg -1 -90 90 -90 90
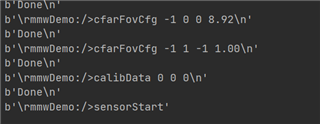
cfarFovCfg -1 0 0 8.92
cfarFovCfg -1 1 -1 1.00
calibData 0 0 0
sensorStart
现在出现了如下问题:
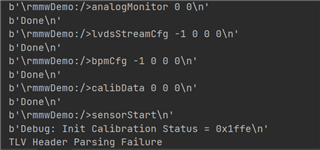
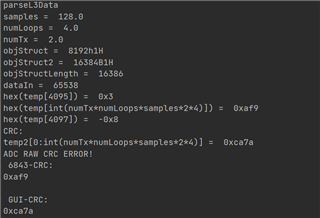
在运行gui_main.py,选择cfg配置文件并发送之后并没有数据bin文件产生,在pycharm中的控制台显示如下信息(似乎是卡住了,无法继续执行)
想请教您我该如何解决此问题,谢谢!