尊敬的TI工程师和论坛的朋友们:
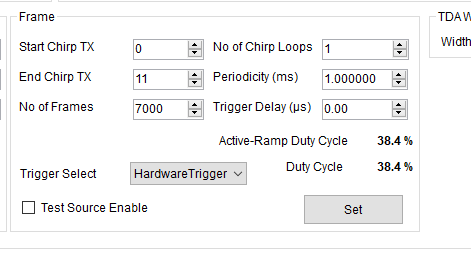
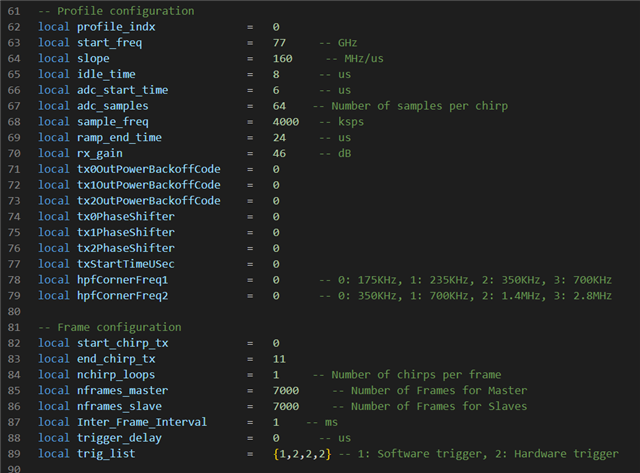
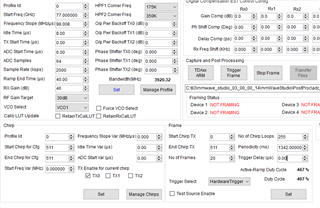
我们在MMWAVCAS-RF-EVM级联板上进行功能开发时,需要实现长时间均匀发射和接收chirps,如下图是我们在GUI中的设置:
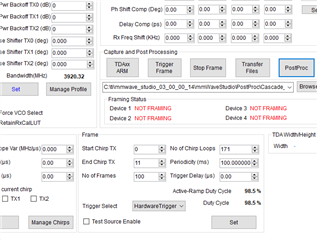
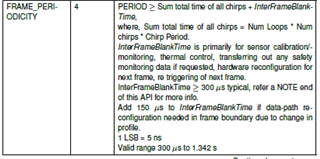
理想情况是,帧周期100ms,连续发射100帧,每帧包含171个chirp,即共连续发射171*100=17100个chirp,这17100个chirp发射的间隔应该相同。然而目前仅能保证帧内的chirp间隔为给定的idle time。在每帧结束时需要一段不可控空白时间,导致duty cycle不能设置为100%。当我们将其设置为100%时出现“ FRAME_ON_TIME>FRAME_PERIODICITY“的错误。在论坛上我们找到了下面的说明
似乎这段空闲时间被指定为200usec+1chirp period。请问各位是否有办法能解决帧间chirp间隔不可控的问题,或者有其他方法能实现连续的chirp发射?谢谢大家!