我按照之前介绍的操作对参数进行修改,保存后运行gui出现下面问题,请问如何解决!
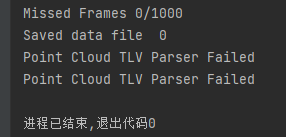
Missed Frames 0/1000
Saved data file 0
Point Cloud TLV Parser Failed
Point Cloud TLV Parser Failed

我按照之前介绍的操作对参数进行修改,保存后运行gui出现下面问题,请问如何解决!
Missed Frames 0/1000
Saved data file 0
Point Cloud TLV Parser Failed
Point Cloud TLV Parser Failed

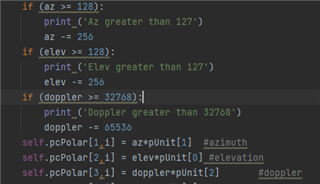
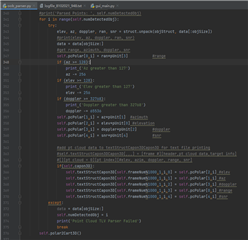 ,能请教下这个判定到底什么意思吗?
,能请教下这个判定到底什么意思吗?