


大家好。我想我需要各位的帮助。谢谢!
当我用iwr1642跟踪车辆时,我发现一辆车在运动过程中变成了两辆车并排,它们到雷达安装位置的距离和速度是一致的。
类似这种情况
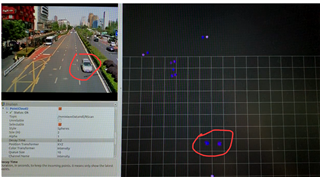
与这种情况相关的参数是什么?哪些参数设置不正确会导致此问题?
我的雷达跟踪算法参数设置如下图所示

cfg配置文件设置如下
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 15 1 0
adcCfg 2 1
adcbufCfg 0 1 1 1
profileCfg 0 77 2 4.20 41.84 0 0 8.40 1 228 6223 0 0 52
chirpCfg 0 0 0 0 0 0 0 1
frameCfg 0 0 114 0 50 1 0
lowPower 0 1
guiMonitor 1 0 0 0
cfarCfg 2 12 2 16 8 4 0 30 30 0 1
doaCfg 3 0 1047 3 600 10 100
trackingCfg 1 0 250 1 0 0 0 90
compRangeBiasAndRxChanPhase -0.0438848 0.12320 -0.62793 0.08932 -0.50342 -0.03458 -0.58853 0.06812 -0.69101 -0.79391 -0.60803 -0.63580 -0.45255 -0.70901 -0.26627 -0.73044 -0.46078
sensorStart
除了提高信噪比之外,还可以修改哪些参数来避免这种情况?

