各位前輩們好
請教一個可能是基本換算的問題,
我想在範例中對 objOut -> y 的值做對應旗標
objOut -> y 小於 2.5 將 R_alarm 至 1
objOut -> y 介於 2.5 ~ 4.5 將 Y_alarm 至 1
objOut -> y 等於 其它時 將 No_alarm 至 1
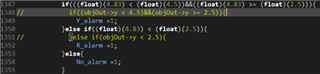
if((objOut->y < (float)(4.5)) && (objOut->y >= (float)(2.5))){
Y_alarm =1;
}else if(objOut->y < (float)(2.5)){
R_alarm =1;
}else{
No_alarm =1;
}
但在無論怎麼執行,都只會進入 R_alarm =1的判斷式裡面。
Debug模式下可以看到 objOut -> y = 4.83...
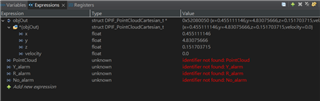
以這值來看應該要讓 No_alarm =1,但是並沒有,
請問各位前輩,是否是我哪邊使用錯誤呢?
謝謝。